卷积神经网络(Convolutional Neural Network,
CNN)是一种专门用于处理具有网格状拓扑数据(如图像)的深度学习模型。CNN在计算机视觉领域表现卓越,广泛应用于图像分类、对象检测、图像分割等任务。
输入层 :接收原始图像数据,通常为三维数组(宽度、高度、通道数)。卷积层 :对输入图像进行卷积操作,生成特征图。激活函数 :对卷积结果应用激活函数,如ReLU。池化层 :对特征图进行池化操作,降低特征图尺寸。重复上述卷积层、激活函数和池化层 ,直到提取出高层次特征。全连接层 :将高层次特征展平成一维向量,输入到全连接层进行分类。输出层 :生成最终的分类结果。
一、卷积层
1.1 图像卷积
输入是高度为
在如上例子中,输出张量的四个元素由二维互相关运算得到,这个输出高度为
注意,输出大小略小于输入大小。这是因为卷积核的宽度和高度大于1,而卷积核只与图像中每个大小完全适合的位置进行互相关运算。所以,输出大小等于输入大小
这是因为需要足够的空间在图像上“移动”卷积核。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 import torchfrom torch import nndef comp_conv2d (conv2d, X ):1 , 1 ) + X.shape)return Y.reshape(Y.shape[2 :])3 , 3 ))1 , 1 , kernel_size=2 )
1.2 填充
在应用多层卷积时,常常丢失边缘像素。由于通常使用小卷积核,因此对于任何单个卷积,可能只会丢失几个像素。但随着应用许多连续卷积层,累积丢失的像素数就多了。解决这个问题的简单方法即为填充 (padding):在输入图像的边界填充元素(通常填充元素是
将
通常,如果添加
。
这意味着输出的高度和宽度将分别增加
使用奇数的核大小和填充大小也提供了书写上的便利。对于任何二维张量X,当满足:
1. 卷积核的大小是奇数; 2. 所有边的填充行数和列数相同; 3.
输出与输入具有相同高度和宽度
则可以得出:输出Y[i, j]是通过以输入X[i, j]为中心,与卷积核进行互相关计算得到的。
1 2 3 4 1 , 1 , kernel_size=3 , padding=1 )8 , 8 ))
1 2 conv2d = nn.Conv2d(1 , 1 , kernel_size=(5 , 3 ), padding=(2 , 1 ))
1.3 步幅
在计算互相关时,卷积窗口从输入张量的左上角开始,向下、向右滑动。在前面的例子中,默认每次滑动一个元素。但是,有时候为了高效计算或是缩减采样次数,卷积窗口可以跳过中间位置,每次滑动多个元素。
垂直步幅为
通常,当垂直步幅为
如果设置了
下面,我们[将高度和宽度的步幅设置为2 ],从而将输入的高度和宽度减半。
1 2 conv2d = nn.Conv2d(1 , 1 , kernel_size=3 , padding=1 , stride=2 )
1 2 conv2d = nn.Conv2d(1 , 1 , kernel_size=(3 , 5 ), padding=(0 , 1 ), stride=(3 , 4 ))
为了简洁起见,当输入高度和宽度两侧的填充数量分别为
1.4 多输入通道
当输入包含多个通道时,需要构造一个与输入数据具有相同输入通道数的卷积核,以便与输入数据进行互相关运算。假设输入的通道数为
然而,当
演示一个具有两个输入通道的二维互相关运算的示例。阴影部分是第一个输出元素以及用于计算这个输出的输入和核张量元素:
1 2 3 4 5 6 X = torch.tensor([[[[0.0 , 1.0 , 2.0 ], [3.0 , 4.0 , 5.0 ], [6.0 , 7.0 , 8.0 ]],1.0 , 2.0 , 3.0 ], [4.0 , 5.0 , 6.0 ], [7.0 , 8.0 , 9.0 ]]]])0.0 , 1.0 ], [2.0 , 3.0 ]], [[1.0 , 2.0 ], [3.0 , 4.0 ]]]])2 ,1 , kernel_size=2 )
1 2 tensor([[[[ 55.6891, 71.6891],
1.5 多输出通道
每一层有多个输出通道是至关重要的。在最流行的神经网络架构中,随着神经网络层数的加深,通常会增加输出通道的维数,通过减少空间分辨率以获得更大的通道深度。直观地说,可以将每个通道看作对不同特征的响应。而现实可能更为复杂一些,因为每个通道不是独立学习的,而是为了共同使用而优化的。因此,多输出通道并不仅是学习多个单通道的检测器。
用
1 2 3 K = torch.tensor([[[0.0 , 1.0 ], [2.0 , 3.0 ]], [[1.0 , 2.0 ], [3.0 , 4.0 ]]])1 , K + 2 ), 0 )
1 torch.Size([3, 2, 2, 2])
1 2 3 conv2d = nn.Conv2d(2 ,3 , kernel_size=2 )
1 2 3 4 5 6 7 8 tensor([[[[ 56.1745, 72.1745],
1.6
因为使用了最小窗口,
下图展示了使用
下面,使用全连接层实现
1 2 3 4 5 6 X = torch.normal(0 , 1 , (3 , 3 , 3 ))0 , 1 , (2 , 3 , 1 , 1 ))1 ,2 , kernel_size=1 )
1 2 3 4 5 6 7 tensor([[[-0.2232, 0.5647, 1.6974],
1.7 卷积类型
1.7.1 普通卷积
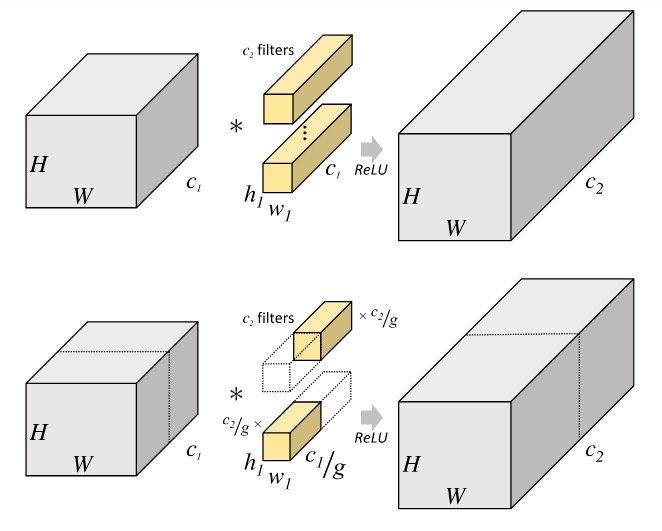
普通卷积的操作分成3个维度,在空间维度(H和W维度)是共享卷积核权重滑窗相乘求和(融合空间信息),在输入通道维度是每一个通道使用不同的卷积核参数并对输入通道维度求和(融合通道信息),在输出通道维度操作方式是并行堆叠(多种),有多少个卷积核就有多少个输出通道
1.7.2 空洞卷积
和普通卷积相比,空洞卷积可以在保持较小参数规模的条件下增大感受野,常用于图像分割领域。其缺点是可能产生网格效应,即有些像素被空洞漏过无法利用到,可以通过使用不同膨胀因子的空洞卷积的组合来克服该问题,参考文章:https://developer.orbbec.com.cn/v/blog_detail/892
1.7.3 分组卷积
和普通卷积相比,分组卷积将输入通道分成g组,卷积核也分成对应的g组,每个卷积核只在其对应的那组输入通道上做卷积,最后将g组结果堆叠拼接。由于每个卷积核只需要在全部输入通道的https://zhuanlan.zhihu.com/p/65377955
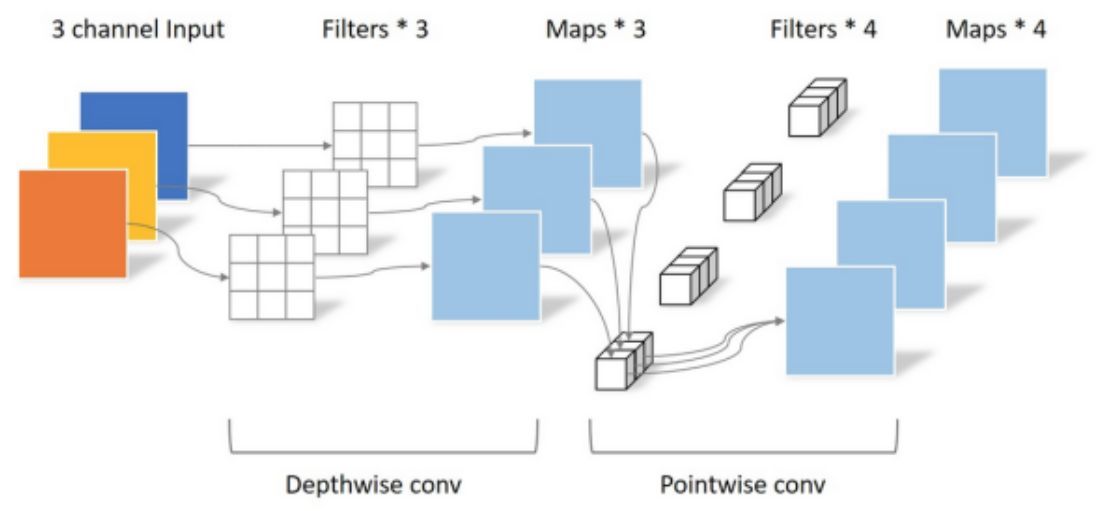
1.7.4 深度可分离卷积
深度可分离卷积的思想是先用
1.7.5 转置卷积
一般的卷积操作后会让特征图尺寸变小,但转置卷积(也被称为反卷积)可以实现相反的效果,即放大特征图尺寸。对两种方式理解转置卷积,第一种方式是转置卷积是一种特殊的卷积,通过设置合适的padding的大小来恢复特征图尺寸。第二种理解基于卷积运算的矩阵乘法表示方法,转置卷积相当于将卷积核对应的表示矩阵做转置,然后乘上输出特征图压平的一维向量,即可恢复原始输入特征图的大小。
参考文章:https://zhuanlan.zhihu.com/p/115070523
暂时忽略通道,从基本的转置卷积开始,设步幅为1且没有填充。假设有一个
下图解释了如何为
1 2 3 4 5 6 X = torch.tensor([[0.0 , 1.0 ], [2.0 , 3.0 ]])0.0 , 1.0 ], [2.0 , 3.0 ]])1 , 1 , 2 , 2 ), K.reshape(1 , 1 , 2 , 2 )1 , 1 , kernel_size=2 , bias=False )
1 2 3 tensor([[[[ 0., 0., 1.],
填充、步幅和多通道
与常规卷积不同,在转置卷积中,填充被应用于的输出(常规卷积将填充应用于输入)。例如,当将高和宽两侧的填充数指定为1时,转置卷积的输出中将删除第一和最后的行与列。
1 2 3 tconv = nn.ConvTranspose2d(1 , 1 , kernel_size=2 , padding=1 , bias=False )
1 tensor([[[[4.]]]], grad_fn=<ConvolutionBackward0>)
在转置卷积中,步幅被指定为中间结果(输出),而不是输入。使用上图中相同输入和卷积核张量,将步幅从1更改为2会增加中间张量的高和权重,因此输出张量在下图中。
以下代码可以验证步幅为2的转置卷积的输出。
1 2 3 tconv = nn.ConvTranspose2d(1 , 1 , kernel_size=2 , stride=2 , bias=False )
1 2 3 4 tensor([[[[0., 0., 0., 1.],
对于多个输入和输出通道,转置卷积与常规卷积以相同方式运作。假设输入有
同样,如果将
1 2 3 4 X = torch.rand(size=(1 , 10 , 16 , 16 ))10 , 20 , kernel_size=5 , padding=2 , stride=3 )20 , 10 , kernel_size=5 , padding=2 , stride=3 )
抽象来看,给定输入向量
二、池化层(pooling)
池化层(pooling)层,它具有双重目的:降低卷积层对位置的敏感性,同时降低对空间降采样表示的敏感性。与卷积层类似,池化层运算符由一个固定形状的窗口组成,该窗口根据其步幅大小在输入的所有区域上滑动,为固定形状窗口遍历的每个位置计算一个输出。
然而,不同于卷积层中的输入与卷积核之间的互相关计算,池化层不包含参数。
通常计算池化窗口中所有元素的最大值或平均值。这些操作分别称为最大池化层(Max
pooling)和平均池化层(average pooling)。
池化窗口从输入张量的左上角开始,从左往右、从上往下的在输入张量内滑动。在池化窗口到达的每个位置,它计算该窗口中输入子张量的最大值或平均值。计算最大值或平均值是取决于使用了最大池化层还是平均池化层。
输出张量的高度为
池化窗口形状为
Max Pooling
1 2 X = torch.arange(16 , dtype=torch.float32).reshape((1 , 1 , 4 , 4 ))
1 2 pool2d = nn.MaxPool2d(2)
1 2 tensor([[[[ 5., 7.],
Avg Pooling
1 2 pool2d = nn.AvgPool2d(2 )
1 2 tensor([[[[ 2.5000, 4.5000],
2.1 填充和步幅
与卷积层一样,池化层也可以改变输出形状。和以前一样,可以通过填充和步幅以获得所需的输出形状。下面,用深度学习框架中内置的二维最大池化层,来演示池化层中填充和步幅的使用。
深度学习框架中的步幅与池化窗口的大小相同
1 2 pool2d = nn.MaxPool2d(3 )
填充和步幅可以手动设定
1 2 pool2d = nn.MaxPool2d(3 , padding=1 , stride=2 )
1 2 tensor([[[[ 5., 7.],
设定一个任意大小的矩形池化窗口,并分别设定填充和步幅的高度和宽度
1 2 pool2d = nn.MaxPool2d((2 , 3 ), stride=(2 , 3 ), padding=(0 , 1 ))
1 2 tensor([[[[ 5., 7.],
2.2 多个通道
在处理多通道输入数据时,[池化层在每个输入通道上单独运算 ],而不是像卷积层一样在通道上对输入进行汇总。这意味着池化层的输出通道数与输入通道数相同。下面,将在通道维度上连结张量X和X + 1,以构建具有2个通道的输入。
1 2 X = torch.cat((X, X + 1 ), 1 )
1 2 3 4 5 6 7 8 9 tensor([[[[ 0., 1., 2., 3.],
如下所示,池化后输出通道的数量仍然是2。
1 2 pool2d = nn.MaxPool2d(3 , padding=1 , stride=2 )
1 2 3 4 5 tensor([[[[ 5., 7.],
三、上采样和下采样
缩小图像(或称为下采样(subsampled)或降采样(downsampled))的主要目的有两个:
使得图像符合显示区域的大小;
生成对应图像的缩略图。
的主要目的是:放大原图像,从而可以显示在更高分辨率的显示设备上。
3.1 下采样
下采样(subsampled)也称为降采样(downsampled)对图像进行了缩小,下采样的过程是一个信息损失的过程。
通常使用以下方法:
使用步幅为2的池化层:例如Max-pooling和Average-pooling,目前通常使用Max-pooling,因为他计算简单而且能够更好的保留纹理特征。池化层是为了降低特征维度
使用步幅为2的卷积层:卷积过程使图像变小是为了提取特征。池化层是不可学习的,使用可学习卷积层来代替pooling可以得到更好的效果
下采样主要目的是为了使得图像符合显示区域的大小,生成对应图像的缩略图。主要两个作用:
一是减少计算量,防止过拟合;
二是增大感受野,使得后面的卷积核能够学到更加全局的信息。
3.2 上采样
上采样(upsampling)或称为图像插值(interpolating),主要目的是放大原图像。一般有三种方式:
插值,一般使用的是双线性插值,因为效果最好,虽然计算上比其他插值方式复杂,但是相对于卷积计算可以说不值一提,其他插值方式还有最近邻插值、三线性插值等;
转置卷积又或是说反卷积(Transpose Conv),通过对输入feature
map间隔填充0,再进行标准的卷积计算,可以使得输出feature
map的尺寸比输入更大;
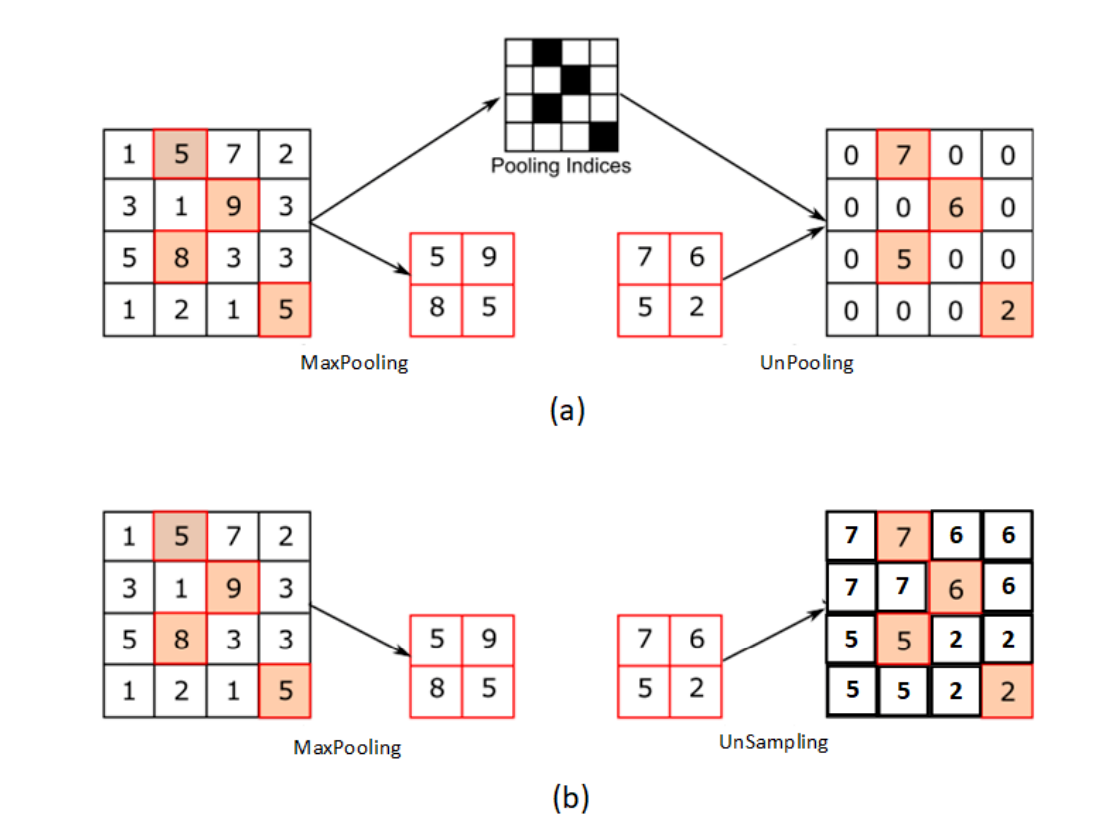
Up-Pooling - Max Unpooling && Avg Unpooling –Max
Unpooling,在对称的max
pooling位置记录最大值的索引位置,然后在unpooling阶段时将对应的值放置到原先最大值位置,其余位置补0;
而UnSampling阶段没有使用MaxPooling时的位置信息,而是直接将内容复制来扩充Feature
Map。
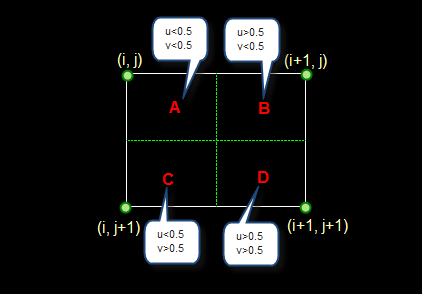
3.2.1 最邻近元法
这种方法最简单,不需要计算,即在待求像素的四个邻像素中,选取距离待求像素最近的邻像素的灰度值赋给待求像素。
如上图所示,新增在A区内的像素就用左上角的像素点来赋值,其余三个区域同理。虽然最邻近元法计算量较小,但可能会造成插值生成的图像灰度上的不连续,在灰度变化的地方可能会出现明显的锯齿状。
3.2.2 双线性插值法
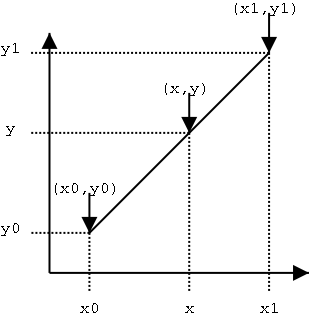
线性插值
假设已知坐标
由于
已知
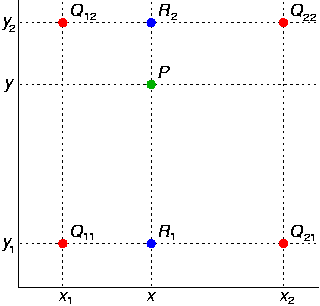
双线性插值法
双线性插值,又称为双线性内插。在数学上,双线性插值是对线性插值在二维直角网格上的扩展,用于对双变量函数(例如
红色的数据点与待插值得到的绿色点
假如想得到未知函数
首先在
然后在
注意此处如果先在
3.2.3 三线性插值
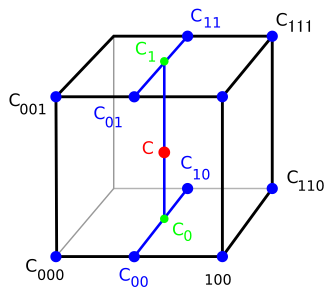
首先,沿着x轴方向插值
然后再沿着y轴插值
最后再沿着z轴插值
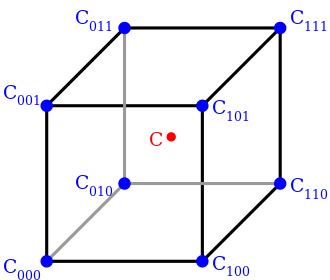
上述操作可以形象化如下:首先,找到围绕需要插值点立方体的八个角。
这些角的值为
接下来,在
现在在
四、卷积神经网络(LeNet)
LeNet是最早发布的卷积神经网络之一,LeNet(LeNet-5)由两个部分组成:
卷积编码器:由两个卷积层组成;
全连接层密集块:由三个全连接层组成。
LeNet中的数据流。输入是手写数字,输出为10种可能结果的概率。
每个卷积块中的基本单元是一个卷积层、一个sigmoid激活函数和平均池化。请注意,虽然ReLU和最大池化更有效,但它们在20世纪90年代还没有出现。每个卷积层使用
为了将卷积块的输出传递给稠密块,必须在小批量中展平每个样本。换言之,将这个四维输入转换成全连接层所期望的二维输入。这里的二维表示的第一个维度索引小批量中的样本,第二个维度给出每个样本的平面向量表示。LeNet的稠密块有三个全连接层,分别有120、84和10个输出。因为我们在执行分类任务,所以输出层的10维对应于最后输出结果的数量。
用深度学习框架实现此类模型非常简单。只需要实例化一个Sequential块并将需要的层连接在一起。
1 2 3 4 5 6 7 8 9 10 11 12 13 import torchfrom torch import nnfrom d2l import torch as d2l1 , 6 , kernel_size=5 , padding=2 ), nn.Sigmoid(),2 , stride=2 ),6 , 16 , kernel_size=5 ), nn.Sigmoid(),2 , stride=2 ),16 * 5 * 5 , 120 ), nn.Sigmoid(),120 , 84 ), nn.Sigmoid(),84 , 10 ))
下面,将一个大小为检查模型 ],以确保其操作与期望的一致。
LeNet 的简化版。
1 2 3 4 X = torch.rand(size=(1 , 1 , 28 , 28 ), dtype=torch.float32)for layer in net:print (layer.__class__.__name__,'output shape: \t' ,X.shape)
1 2 3 4 5 6 7 8 9 10 11 12 Conv2d output shape: torch.Size([1, 6, 28, 28])
加载数据
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 def load_data_fashion_mnist (batch_size, resize=None ): """下载Fashion-MNIST数据集,然后将其加载到内存中""" if resize:0 , transforms.Resize(resize))"../data" , train=True , transform=trans, download=True )"../data" , train=False , transform=trans, download=True )return (data.DataLoader(mnist_train, batch_size, shuffle=True ,4 ),False ,4 ))256
评估函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 def evaluate_accuracy_gpu (net, data_iter, device=None ): """使用GPU计算模型在数据集上的精度""" if isinstance (net, nn.Module):eval () if not device:next (iter (net.parameters())).device2 )with torch.no_grad():for X, y in data_iter:if isinstance (X, list ):for x in X]else :return metric[0 ] / metric[1 ]
训练
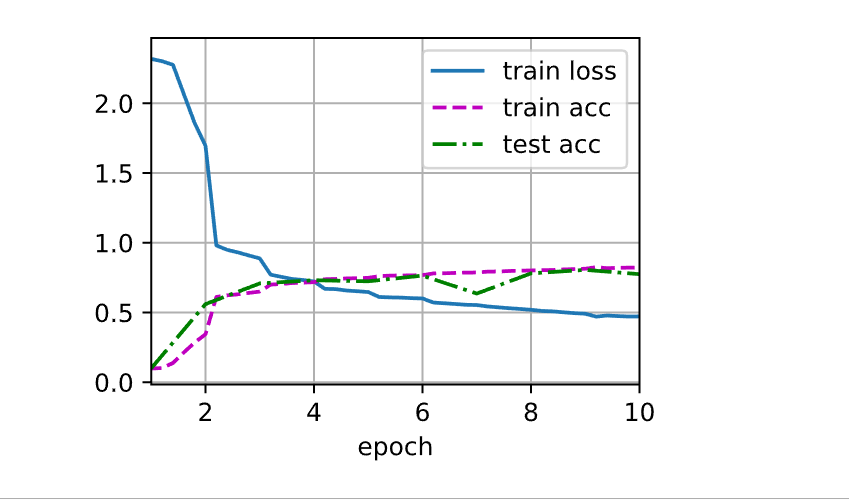
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 def train6 (net, train_iter, test_iter, num_epochs, lr, device ):"""用GPU训练模型""" def init_weights (m ):if type (m) == nn.Linear or type (m) == nn.Conv2d:print ('training on' , device)'epoch' , xlim=[1 , num_epochs],'train loss' , 'train acc' , 'test acc' ])len (train_iter)for epoch in range (num_epochs):3 )for i, (X, y) in enumerate (train_iter):with torch.no_grad():0 ], d2l.accuracy(y_hat, y), X.shape[0 ])0 ] / metric[2 ]1 ] / metric[2 ]if (i + 1 ) % (num_batches // 5 ) == 0 or i == num_batches - 1 :1 ) / num_batches,None ))1 , (None , None , test_acc))print (f'loss {train_l:.3 f} , train acc {train_acc:.3 f} , ' f'test acc {test_acc:.3 f} ' )print (f'{metric[2 ] * num_epochs / timer.sum ():.1 f} examples/sec ' f'on {str (device)} ' )def try_gpu (i=0 ): """如果存在,则返回gpu(i),否则返回cpu()""" if torch.cuda.device_count() >= i + 1 :return torch.device(f'cuda:{i} ' )return torch.device('cpu' )0.9 , 10
1 2 loss 0.472, train acc 0.822, test acc 0.775
参考
李沐-动手学深度学习第二版 反卷积(Deconvolution)、上采样(UNSampling)与上池化(UnPooling) 上采样(UnSampling)
和 下采样(DownSampling)是啥? 上采样和下采样 线性插值 双线性插值 Trilinear
interpolation