LLM(五)——Hardware Optimization Attention
一、PagedAttention
vLLM发现LLM 服务的性能受到内存瓶颈的影响。在自回归 decoder 中,所有输入到 LLM 的 token 会产生注意力 key 和 value 的张量,这些张量保存在 GPU 显存中以生成下一个 token。这些缓存 key 和 value 的张量通常被称为 KV cache,其具有以下特点:
- 显存占用大:在 LLaMA-13B 中,缓存单个序列最多需要 1.7GB 显存;
- 动态变化:KV 缓存的大小取决于序列长度,这是高度可变和不可预测的。因此,这对有效管理 KV cache 挑战较大。该研究发现,由于碎片化和过度保留,现有系统浪费了 60% - 80% 的显存。
为了解决这个问题,该研究引入了 PagedAttention,这是一种受操作系统中虚拟内存和分页经典思想启发的注意力算法。与传统的注意力算法不同,PagedAttention 允许在非连续的内存空间中存储连续的 key 和 value 。具体来说,PagedAttention 将每个序列的 KV cache 划分为块,每个块包含固定数量 token 的K和V。在注意力计算期间,PagedAttention 内核可以有效地识别和获取这些块。
将KV块大小表示为
其中个
在注意力计算过程中,PagedAttention内核分别识别并获取不同的KV块。上图展示了
PagedAttention
的示例:K和V向量分布在三个块上,并且这三个块在物理内存上并不连续。每次内核都会将查询token(“for”)的查询向量
请求生成过程
因为块在内存中不需要是连续的,所以可以像在操作系统的虚拟内存中一样以更灵活的方式管理键和值:可以将块视为页面,将token视为字节,将序列视为进程。序列的连续逻辑块通过块表映射到非连续物理块。当新token生成时,物理块会按需分配。
在 PagedAttention 中,内存浪费仅发生在序列的最后一个块中。实际上,这会导致内存使用接近最佳,浪费率低于 4%。事实证明,内存效率的提高非常有益:它允许系统将更多序列一起批处理,提高 GPU 利用率,从而显着提高吞吐量,如上面的性能结果所示。
并行采样示例
PagedAttention 还有另一个关键优势:高效的内存共享。例如,在并行采样中,从同一提示生成多个输出序列。在这种情况下,提示的计算和内存可以在输出序列之间共享。
PagedAttention 自然可以通过其块表实现内存共享。与进程共享物理页的方式类似,PagedAttention 中的不同序列可以通过将其逻辑块映射到同一物理块来共享块。为了确保安全共享,PagedAttention 跟踪物理块的引用计数并实现 Copy-on-Write 机制。
PageAttention 的内存共享极大地降低了复杂采样算法的内存开销,例如并行采样和波束搜索,将其内存使用量减少高达 55%。这可以将吞吐量提高高达 2.2 倍。这使得这种采样方法在LLM服务中变得实用。
示例代码
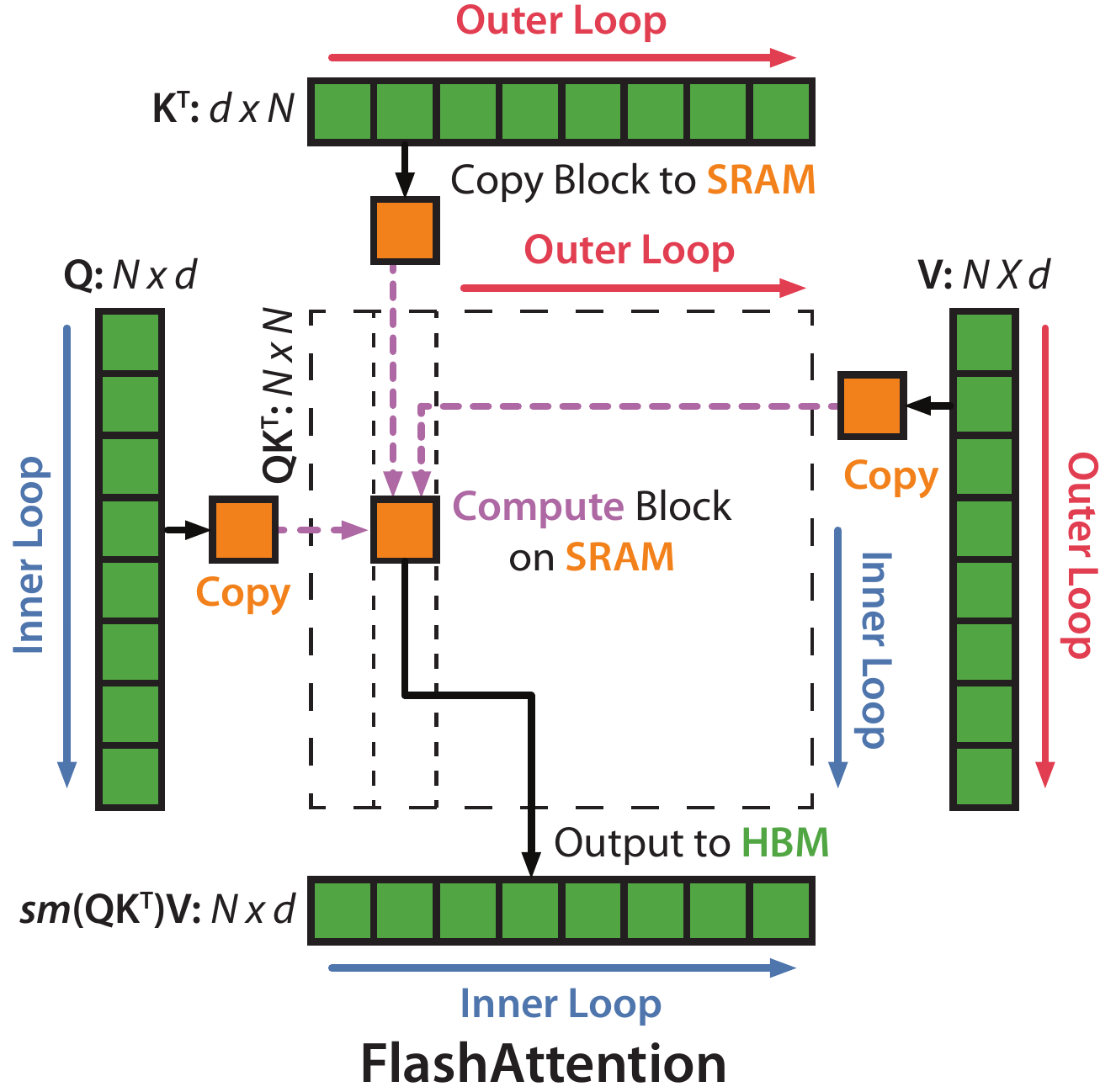
attention计算过程
1 | |
二、FlashAttention
2.1 背景
传统的注意力算法其内存效率是
GPU的内存由多个不同大小和不同读写速度的内存组成。内存越小,读写速度越快。对于A100-40GB来说,内存分级图如下所示:
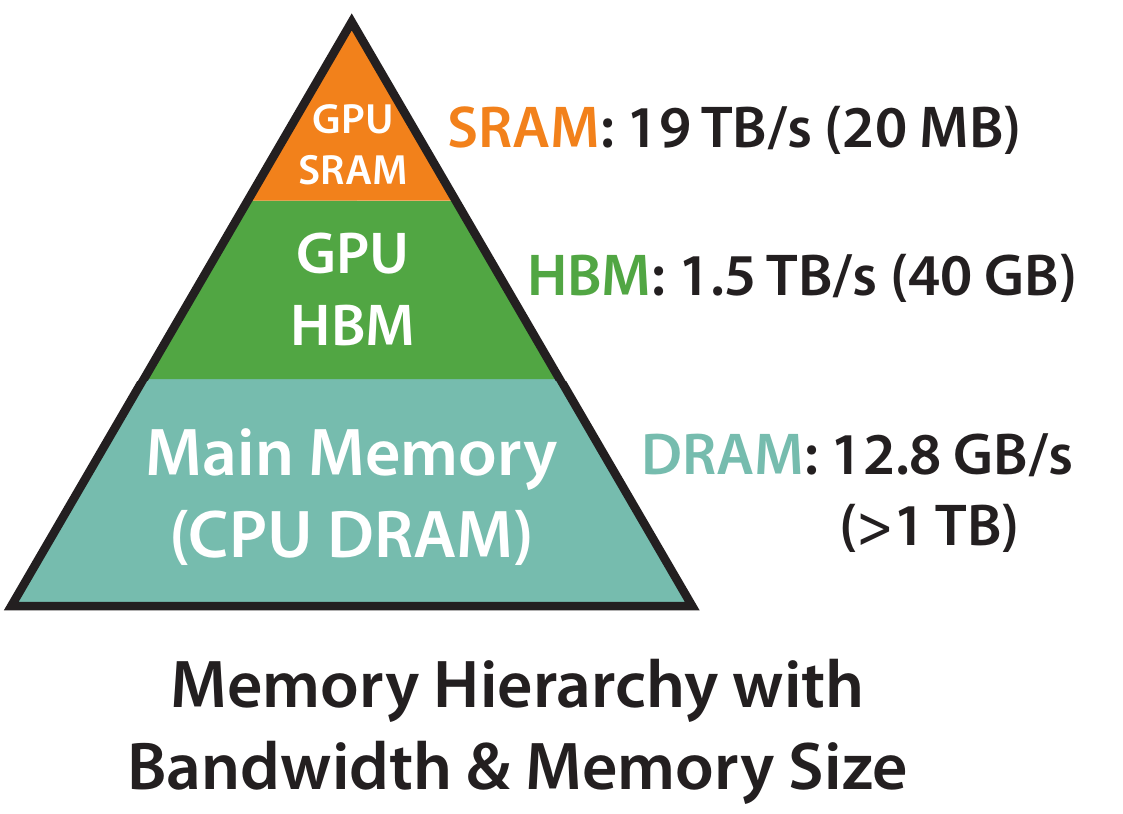
- SRAM内存分布在108个流式多处理器上,每个处理器的大小为192K,合计为
相当于计算块,但内存小 - 高带宽内存HBM(High Bandwidth Memory),也就是我们常说的显存,大小为40GB。SRAM的读写速度为19TB/s,而HBM的读写速度只有1.5TB/s,不到SRAM的1/10相当于计算慢,但内存大
2.2 标准注意力
标准注意力算法背后的计算逻辑:

标准注意力算法基本上将 HBM 加载/存储操作视为0成本(它并不能感知 IO)。
标准注意力计算公式
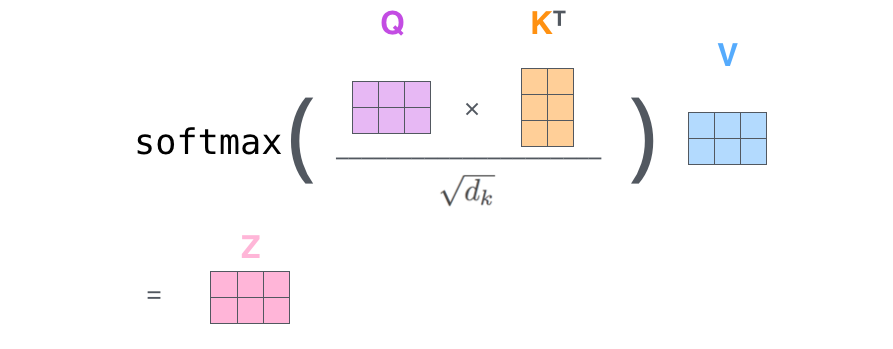
其中
如下图
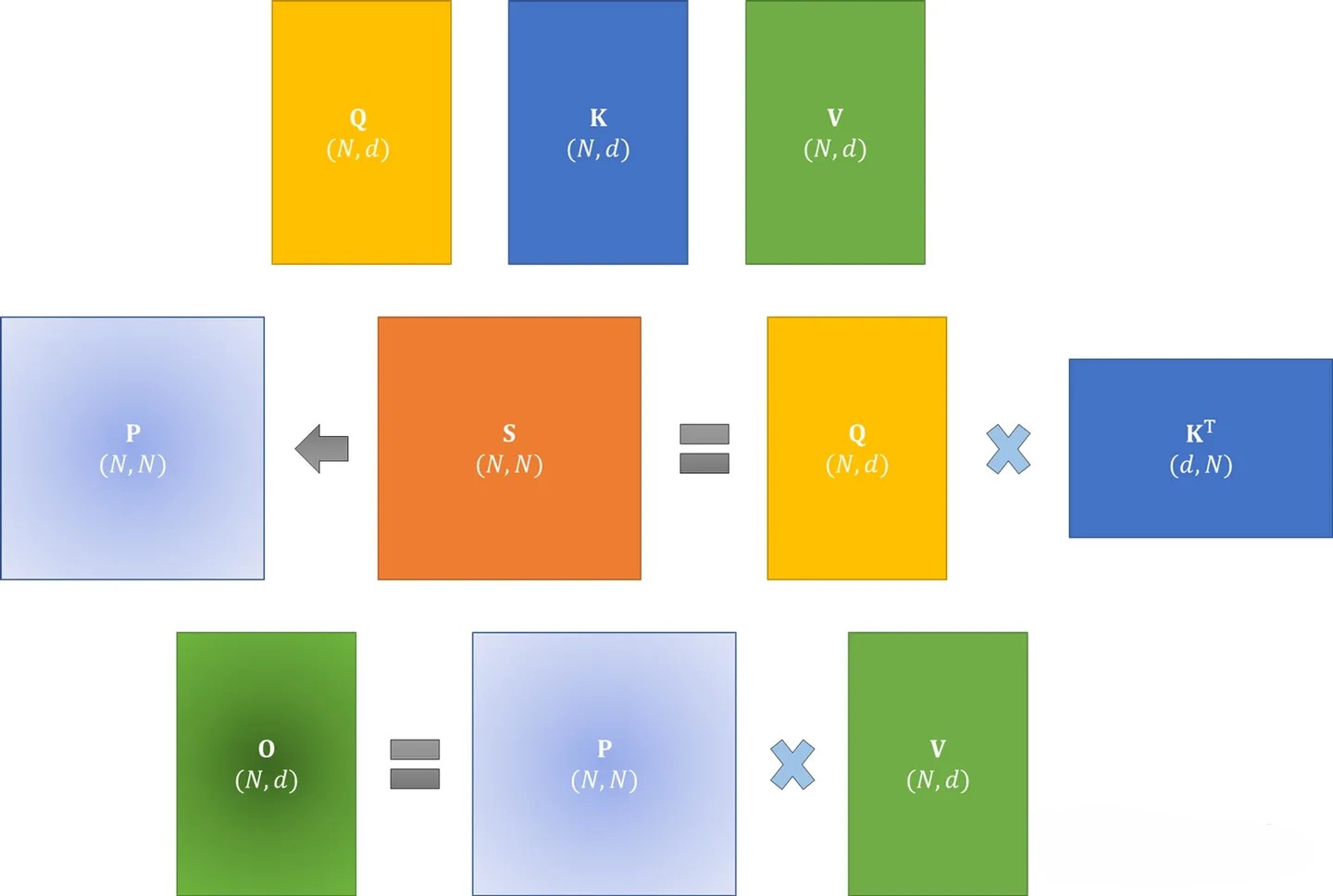
在标准注意力实现中,
标准注意力的过程一共包含八次HBM的矩阵读写操作。这八次读写操作分别为:
- 第一步对
的读共两次,对 的写一次,读写操作总共三次 - 第二步对
读一次,对 写一次,读写操作总共两次 - 第三步对
的读共两次,对 的写一次,读写操作总共三次
下图展示了 GPT-2 模型中一个 Attention 算子的完整计算耗时统计:
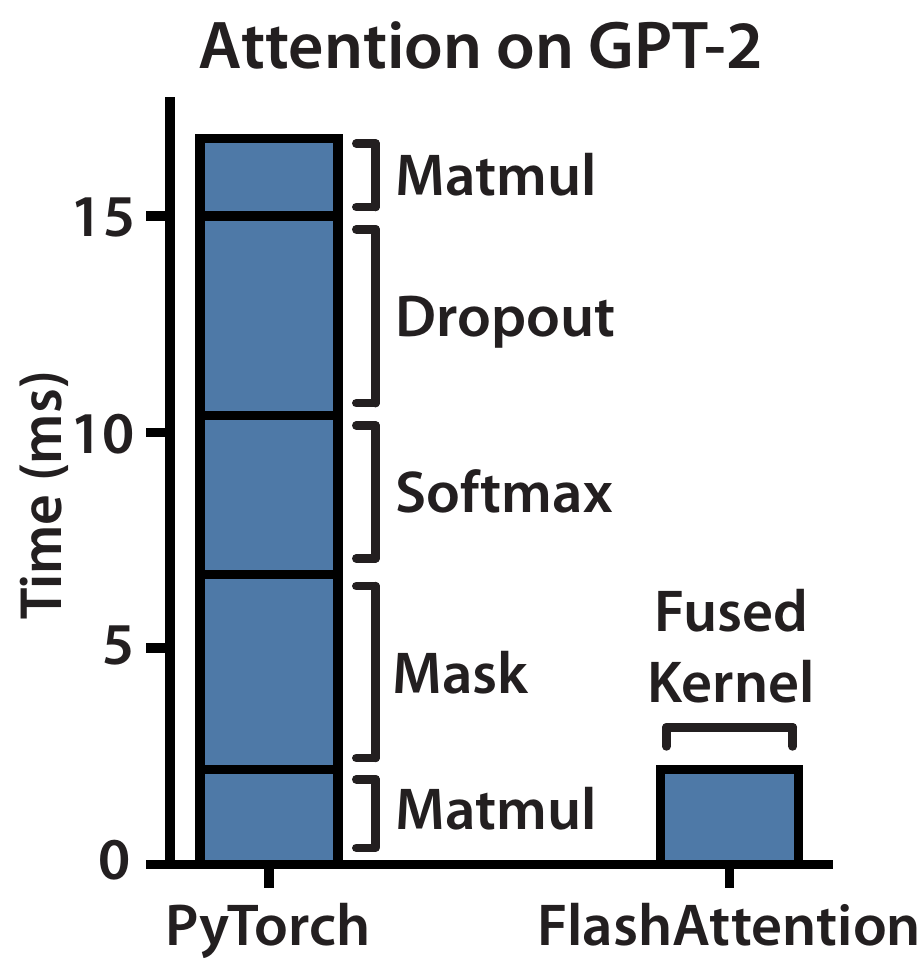
可以看到,masking,softmax 和 dropout 操作占用了大量时间,而主要利用 FLOPS 的矩阵乘法(Matmul)却只占用了一部分时间。HBM读写次数多,减慢了运行时间(wall-clock time)。
2.3 Flash Attention
- GPU有大量的线程来执行某个操作,称为kernel。GPU执行操作的典型方式分为三步:(1)每个kernel将输入数据从低速的HBM中加载到高速的SRAM中;(2)在SRAM中,进行计算;(3)计算完毕后,将计算结果从SRAM中写入到HBM中。
- 对于性能受限于内存带宽的操作,进行加速的常用方式就是kernel融合。kernel融合的基本思想是:避免反复执行“从HBM中读取输入数据,执行计算,将计算结果写入到HBM中”,将多个操作融合成一个操作,减少读写HBM的次数。
FlashAttention 思路是:既然标准注意力算法要将 S 写回 HBM,而这个步骤只为了重新加载计算 Softmax,那么我们可以将其保存在 SRAM 中,等执行完所有中间步骤后,再将最终结果写回 HBM。如下图所示:
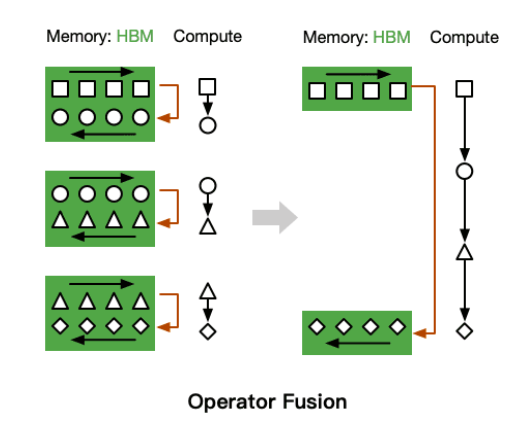
可以看到 FlashAttention 将多个操作融合在一起,其只从 HBM 加载一次,执行融合的算子操作,然后将结果写回 HBM。融合操作主要采用了如下两种技术:
Tiling:矩阵分块计算,在不访问整个输入的情况下计算 Softmax 函数的缩减,在前向和后向传播时都使用;
Recomputation:时间换空间,不存储中间注意力矩阵而采用重计算的方式,仅在后向传播时使用。
2.3.1 Tiling
虽然通过kernel融合的方式,将多个操作融合为一个操作,利用高速的SRAM进行计算,可以减少读写HBM的次数,从而有效减少内存受限操作的运行时间。但有个问题是:
SRAM的内存大小有限,不可能一次性计算完整的注意力,因此必须进行分块计算,使得分块计算需要的内存不超过SRAM的大小相当于,内存受限 –> 减少HBM读写次数 –> kernel融合 –> 满足SRAM的内存大小 –> 分块计算,因此分块大小block_size不能太大,否则会导致OOM。
总之,tiling分块计算可以用一个CUDA kernel来执行注意力的所有操作。从HBM中加载输入数据,在SRAM中执行所有的计算操作(矩阵乘法、mask、softmax、dropout、矩阵乘法),再将计算结果写回到HBM中。
分块计算的难点是什么呢?注意力机制的计算过程是“矩阵乘法 –> scale –> mask –> softmax –> dropout –> 矩阵乘法”,矩阵乘法和逐点操作(scale,mask,dropout)的分块计算是容易实现的,难点在于softmax的分块计算。由于计算softmax的归一化因子(分母)时,需要获取到完整的输入数据,进行分块计算的难度比较大。
tiling的主要思想是分块计算注意力。分块计算的难点在于softmax的分块计算,softmax与
对于两个向量
通过例子说明如何分块计算softmax。对向量
计算block2:
合并得到完整的softmax结果:
总的来说,Flash
Attention通过调整注意力的计算顺序,引入两个额外的统计量进行分块计算,避免了实例化完整的
2.3.2 Flash Attention算法的前向计算算法
在忽略mask和dropout的情况下,简化分析,Flash Attention算法的前向计算过程如下所示:

首先,
设置块大小
是因为Q、K和V向量是d维的,所以还需要将它们组合成输出的 维向量。所以这个大小基本上允许用Q,K,V和0个向量最大化SRAM的容量,以GPT2和A100为例 A100的SRAM大小为
GPT2中
,对应的 的维度为 ,中间结果 的维度大小 , 所以
在 HBM 中初始化
- 用全0初始化输出矩阵
,它将作为一个累加器 类似上文的 其目的是保存softmax的累积分母——exp分数的总和 类似上文的 ,其逐行保存最大分数,且初始化为-inf,因为将对其进行Max运算符,因此无论第一个块的Max是什么,它肯定大于-inf
- 用全0初始化输出矩阵
将
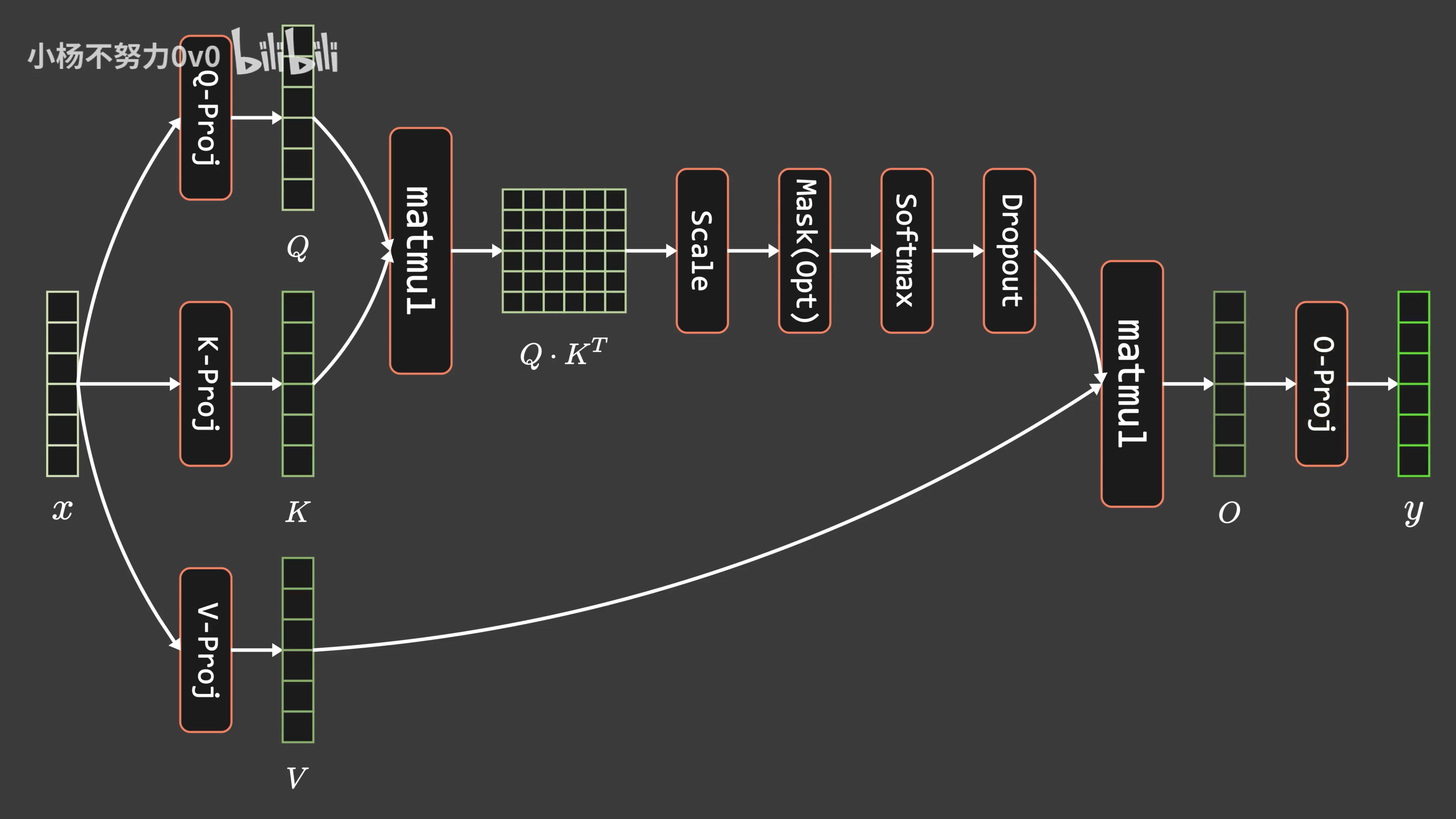
分成 个块 ,每个块大小为 ;将 分成 个块 和 ,每个块大小为 - 按照步骤1中的块大小,将
分成块具体来说,则是 沿着行方向分为 块,每一分块的大小为 沿着行方向分为 块,每一分块的大小为 而
- 按照步骤1中的块大小,将
将
分成 个块 ,每个块大小为 ;将 分成 个块 ,每个块大小为 ;将 分成 个块 ,每个块大小为 - 将
分割成块,其中, 的块大小相同,也是沿着行方向分为 块,每一分块的大小为 - 至于向量
和向量 则分为 块,每一块子向量大小为
- 将
综合上述3、4两个步骤:先后切分
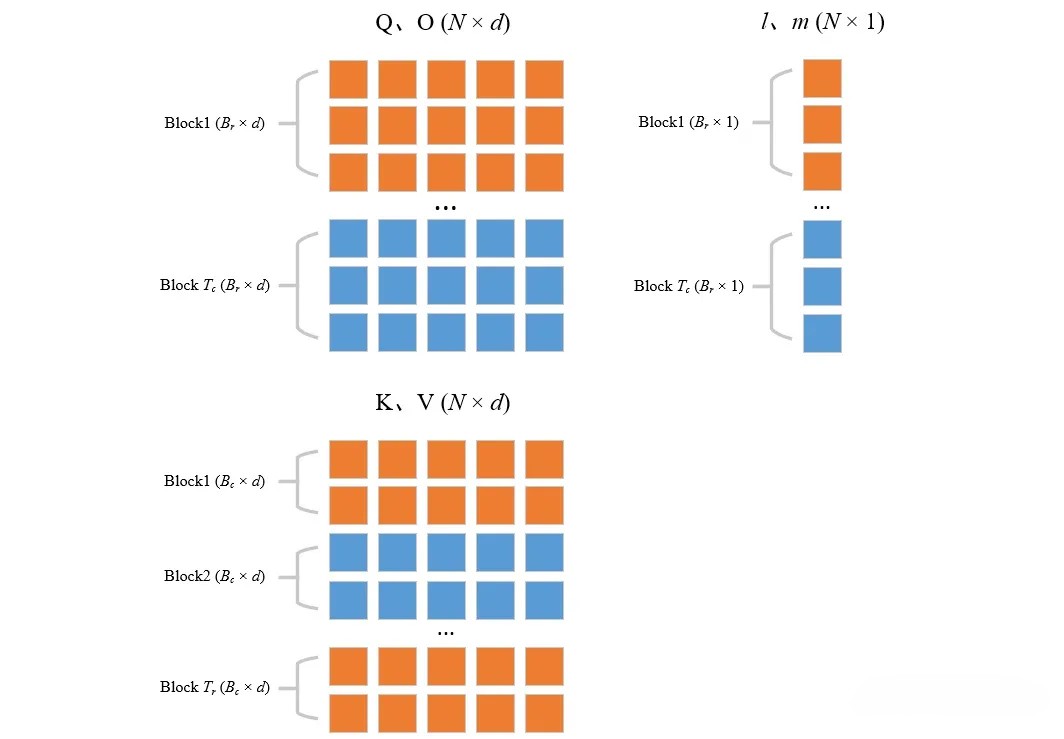
切分完之后,接下来开启两大循环,先外(列)循环 再内(行)循环
for
- 开始跨列循环(即外部循环,由
控制,从上一列到下一列),即跨K/V向量,即遍历 ,一共循环 次。
- 开始跨列循环(即外部循环,由
将 从慢速HBM 加载到片上快速SRAM - 将
和 块从HBM加载到SRAM(它们的大小为 ) - 在这个时间点上仍然有50%的SRAM未被占用(专用于
和 )
- 将
for - 开始跨行内部循环(从上一行到下一行),即跨查询向量,一共循环
次,可只在遍历
- 开始跨行内部循环(从上一行到下一行),即跨查询向量,一共循环
将 从 HBM 加载到片上 SRAM - 将
和 块以及 和 加载到SRAM中 - 这里需要保证l_i和m_i能够载入SRAM(包括所有中间变量)
- 将
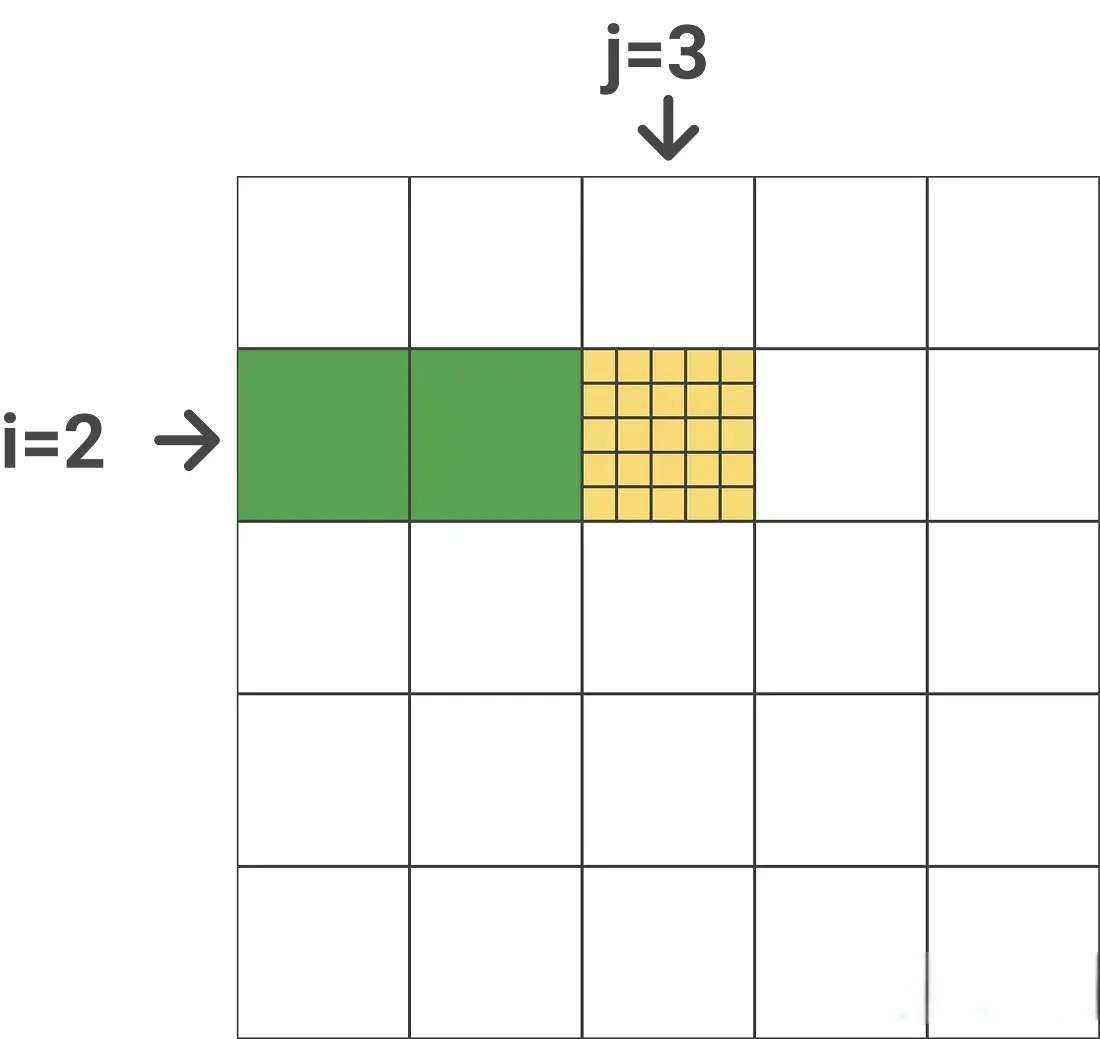
在芯片上,计算 这一步计算
和 转置 之间的点积,得到分块的Attention Score 在标准的Transformer计算中Attention Score是一个
的矩阵,如下图所示(图中 , , ) 当
,遍历 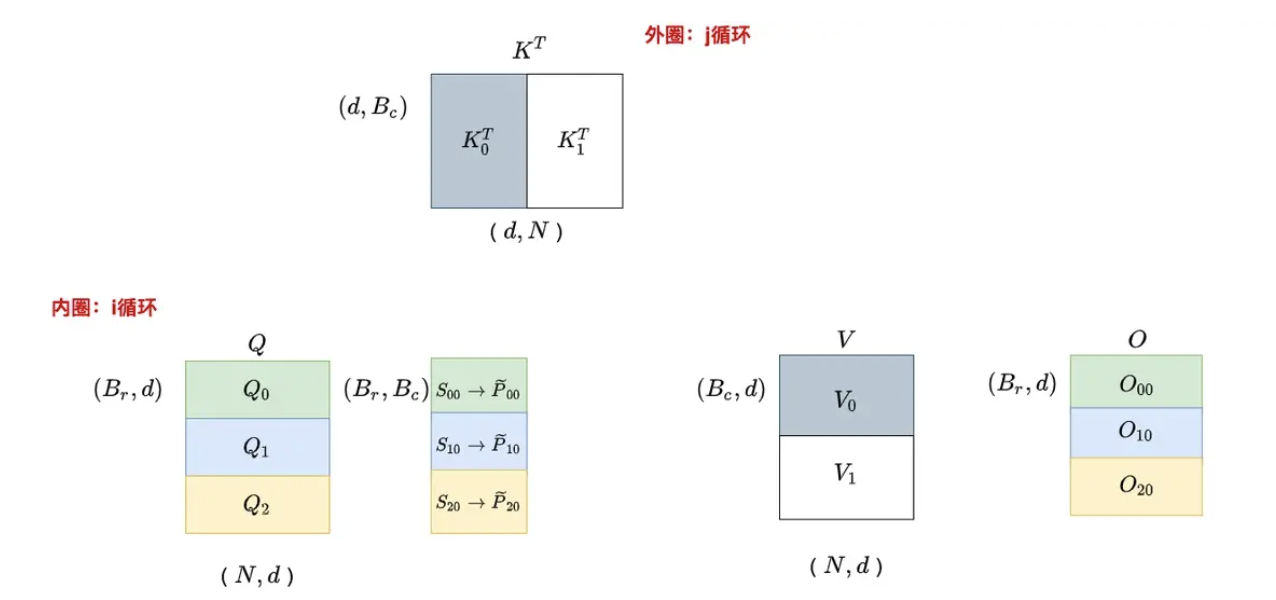 当
当,遍历 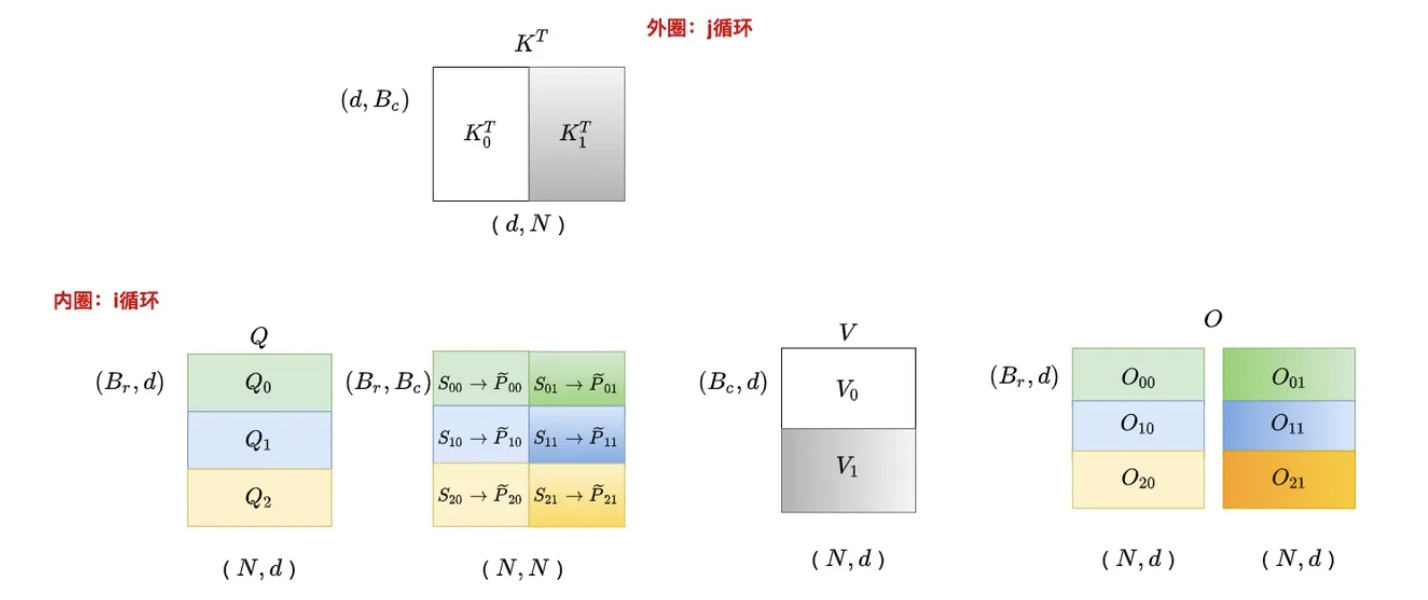
在芯片上,计算 、 (逐点)、 - 使用上一步计算的分数计算
、 和 - 对分块的Attention Score
,计算它每一行中的最大值 - 基于
,计算指数项(归一化-取行最大值并从行分数中减去它,然后EXP): - 然后再基于
,计算EXP求和项(矩阵P的逐行和):
- 使用上一步计算的分数计算
在芯片上,计算 , - 这一步是计算
和 ,举个例子,如下图所说:
- m_{i}包含之前所有块的逐行最大值(
& ,用绿色表示), 包含当前块的逐行最大值(用黄色表示)。 - 为了得到
只需要在 和 之间取一个最大值, 也类似
- 这一步是计算
将 写入 HBM - 在第9步中,每一个小分块
有多行(图中为3行),但行与行之间的数据不会有任何的交互,只是一种Batch计算的策略。真正的分块意义是在列上,因为softmax是沿着列方向进行的 - 所以为了方便理解,可以想象为
等于1,即每一次只计算上上图中的一个大小为 ( )的分块 - 基于上述的简化方法,接下来看整个softmax的更新过程。首先,用
来表示每一行的Attention Score,用 表示每一行的 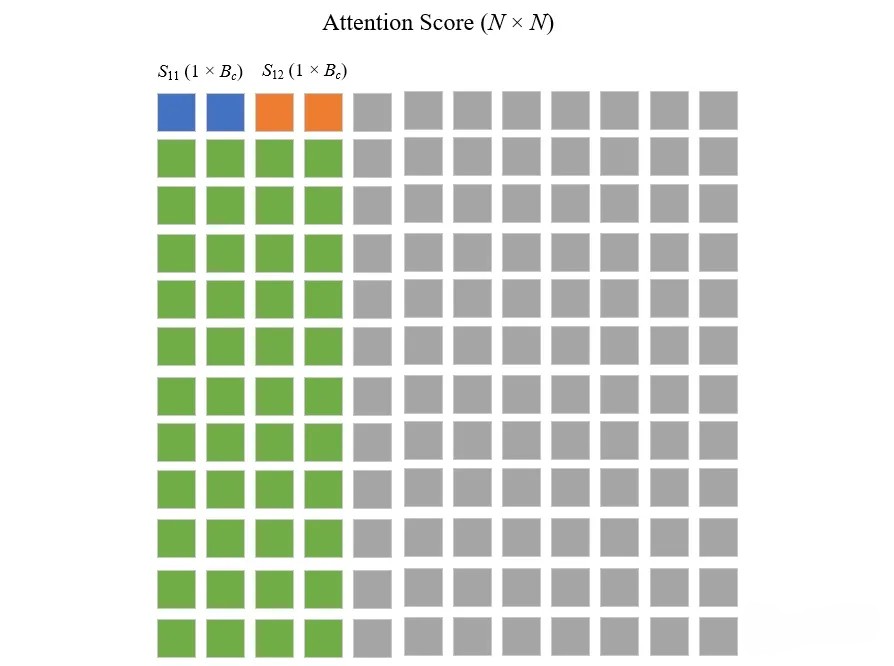
- 在第9步中,每一个小分块
将 , 写入 HBM - 更新
和
- 更新
end for end for
Return O.
2.4 kernel融合中的mask和dropout
给定输入
其中,
- causal-lm结构和prefix-lm结构的主要差别就是MASK矩阵不同
逐点作用在 的每个元素上,以 的概率将该元素置为0,以 的概率将元素置为
三、FlashAttention-2
Flash Attention仍然不如其他基本操作(比如矩阵乘法)高效:
- 虽然Flash Attention已经比标准的注意力实现快2-4倍,但前向传播仅达到设备理论最大FLOPs/s的30-50%,而反向传播更具挑战性,仅达到A100 GPU最大吞吐量的25-35%
- 相比之下,优化的矩阵乘法可以达到理论最大设备吞吐量的80-90%。 通过仔细的分析,观察到Flash Attention在GPU上不同线程块和线程束之间的工作划分仍然不够优化,导致低占用率或不必要的共享内存读写
FlashAttention2是在FlashAttention基础上提出的,具有更好的并行性和工作分区
- 调整算法以减少非矩阵乘法操作的浮点运算次数,同时保持输出不变。
- 尽管非矩阵乘法操作仅占总浮点运算次数FLOPs的一小部分,但执行非矩阵乘法操作的时间较长。原因在于GPU具有专门用于矩阵乘法的计算单元,Nvidia GPU上的张量核心,可让矩阵乘法的吞吐量相比非矩阵乘法高达16倍。以A100 GPU为例,其FP16/BF16矩阵乘法的最大理论吞吐量为312 TFLOPs/s,而非矩阵乘法的FP32吞吐量仅为19.5 TFLOPs/s。换言之,每个非矩阵乘法的FLOP比矩阵乘法的FLOP贵16倍。因此,减少非矩阵乘法操作的浮点运算次数并尽可能多地执行矩阵乘法操作非常重要。
- 在序列长度维度上同时并行化前向传播和反向传播,除了批次和头数维度。 这样做可以提高GPU资源的利用率,特别是在序列较长(因此批次大小通常较小)的情况下。
- 即使在注意力计算的一个块内部,也将工作分配给不同的线程块以减少通信和共享内存的读写
3.1 Flash Attention V2 前向传播层面的改进
3.1.1 Flash Attention 前向传播算法
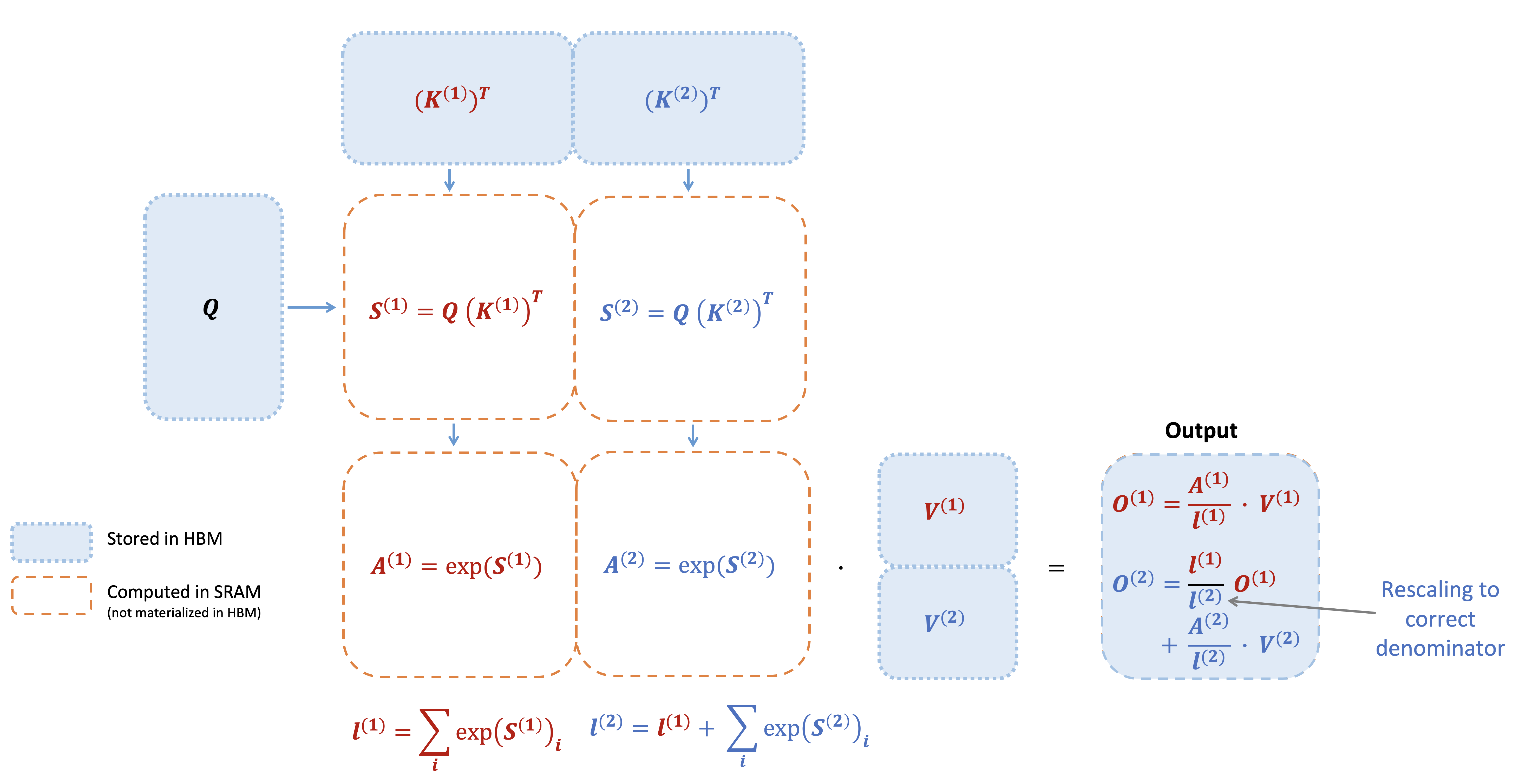
- 为简单起见,仅考虑注意矩阵
的一个行块,其形式为 ,其中矩阵 , 和 分别是行块和列块大小。 - 要计算此行块的 softmax,并将其与以下值相乘,形式为
,其中矩阵 。 - 标准 softmax 将计算:
- 在线 softmax 会针对每个块计算“局部”softmax,然后重新缩放以最终获得正确的输出(红色部分表示V1和V2区别):
下图所示,展示了当
3.1.2 Flash Attention2的前向传播算法
Flash Attention2完整的前向传递过程
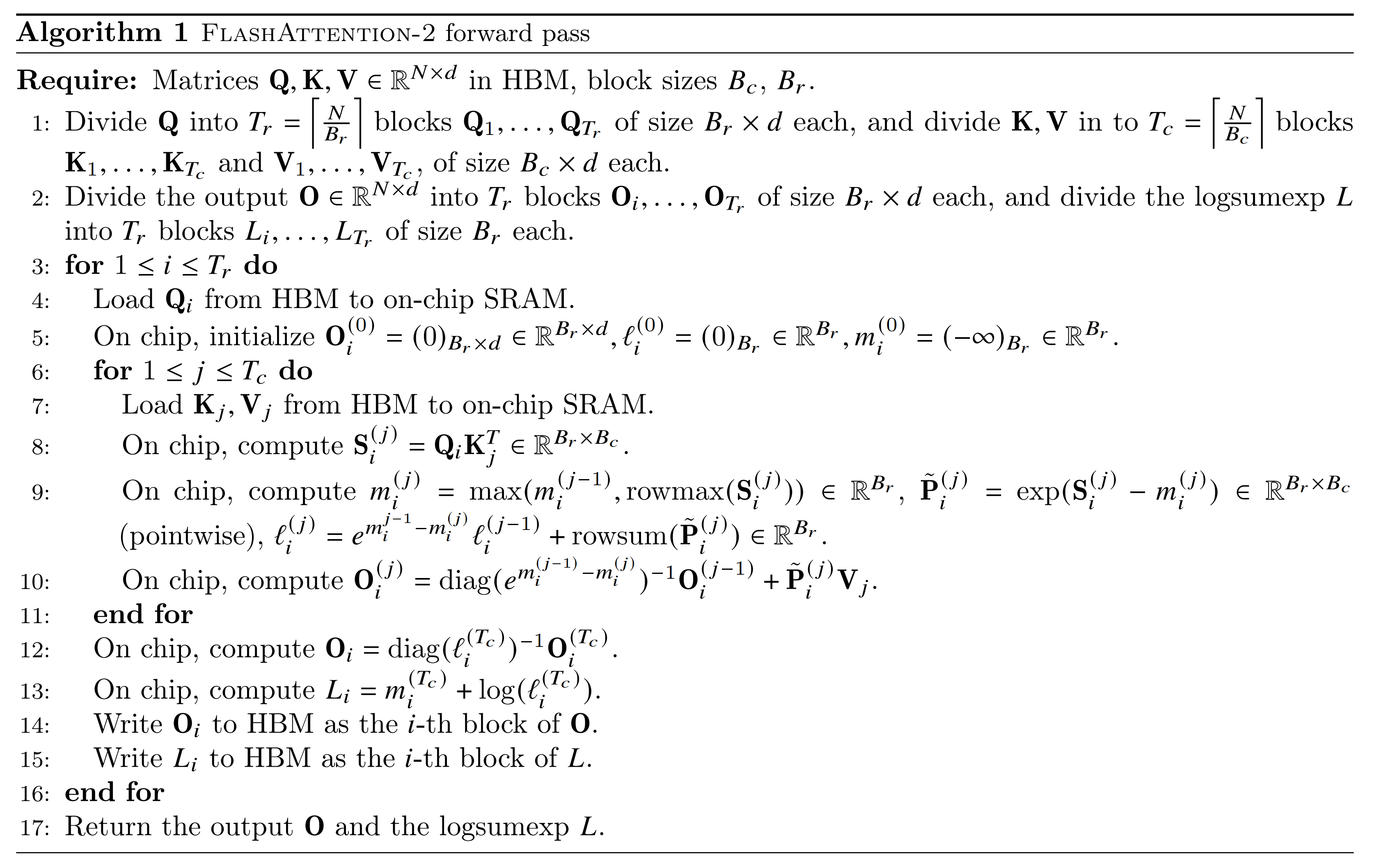
V2相比V1,在前向传播层面进行了两个小的调整,以减少非矩阵乘法的FLOPs:
- 不需要通过
重新调整输出更新的两个项:
可以保留
仅在循环的每个结束时,才会将最后的
不必同时保存最大值
和指数和 以供反向传播。只需存储logsumexp 。 在 2 个块的简单情况下,在线 softmax 技巧现在变成(红色部分表示V1和V2区别):
通过例子说明如何分块计算softmax。对向量
计算block2,得出softmax结果:
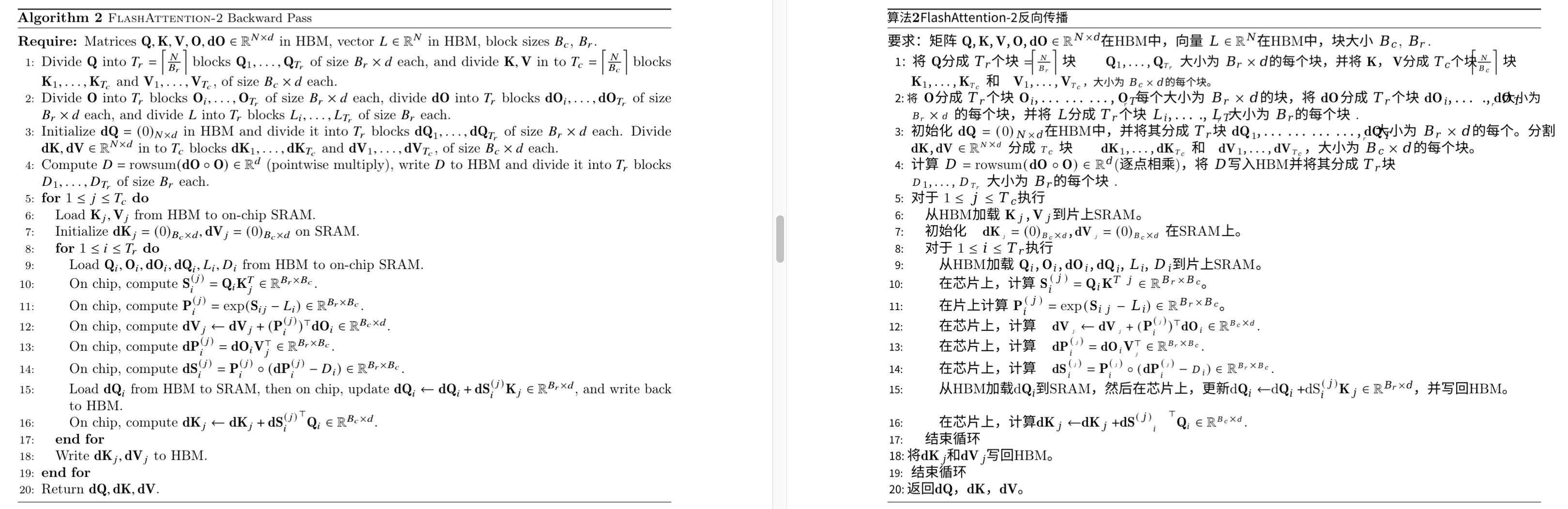
3.2 Flash Attention V2 反向传播层面的改进
在标准注意力实现中, 后向传递计算
总的来说, Flash Attention通过调整注意力的计算顺序,
引入两个额外的统计量进行分块计算, 避免了实例化完整的
Flash Attention2的反向传播与Flash Attention几乎相同。 但对softmax中的行方向logsumexp 𝐿进行了微小的调整,而不是同时使用行方向的最大值和指数和。以下是FlashAttention2的反向传播完整流程:
3.3 并行化与Work Partitioning Between Warps
3.3.1 并行化下的前向传播与反向传播
FlashAttention的第一个版本在批量大小和头数上进行了并行化,使用 1
个线程块来处理一个注意力头,总共有
每个线程块都被安排在流式多处理器 (SM) 上运行,例如,A100 GPU 上有 108
个这样的 SM。当这个数字很大时(例如
对于长序列(通常意味着小批量或少量头),为了更好地利用 GPU 上的多处理器,现在在序列长度维度上额外进行并行化。这为该方案带来了显着的加速。
- 前向传播
可以看到外循环(在序列长度上)是粗硬的并行,并且将将它们安排在不需要相互通信的不同线程块上。还在批处理维度和磁头数量维度上进行并行化,就像在FlashAttention中所做的那样。当批处理大小和磁头数量较小时,在序列长度上增加的并行性有助于提高占用率(正在使用的 GPU 资源的分数),从而在这种情况下提高速度。
这些交换循环顺序的想法(在原始的FlashAttention论文中,外循环在行块上,内循环在列块上),以及在序列长度维度上并行化的想法首先由 Phil Tillet 在 Triton 中提出并实现。
- 反向传播
不同列块之间唯一共享的计算是在Flash Attention V2
反向传播第15步中的更新
最终,如下图所示
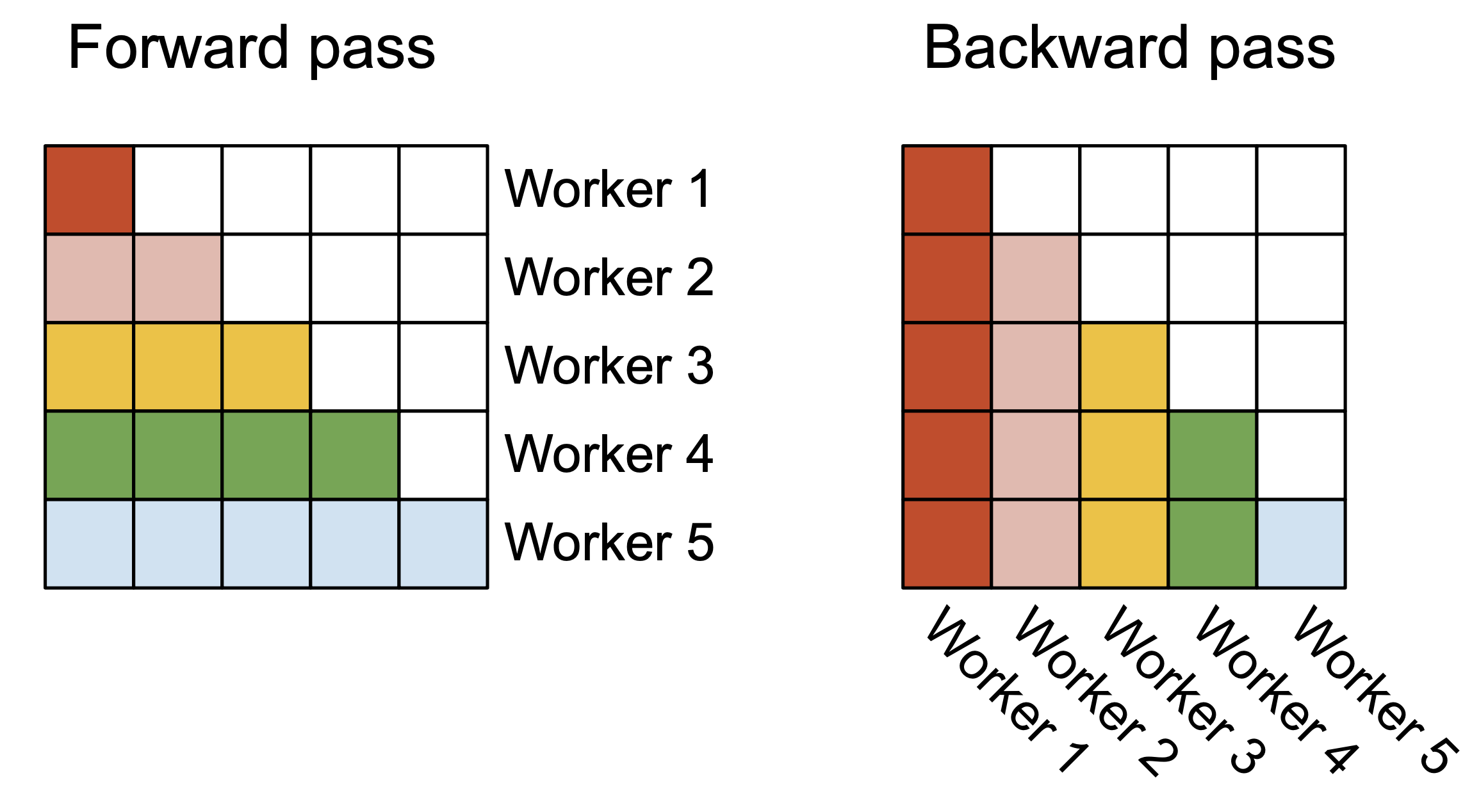
- 在前向传递(左侧)中,将工作线程(线程块)并行化,其中每个工作线程负责处理注意力矩阵的“行块”
- 在后向传递(右侧)中,每个工作线程负责处理注意力矩阵的“列块”
3.3.2 Work Partitioning Between Warps
正如上一节所描述的如何调度线程块,即使在每个线程块内,也必须决定如何在不同的 warp 之间划分工作。通常每个线程块使用 4 或 8 个 warp,具体划分如下图所述:
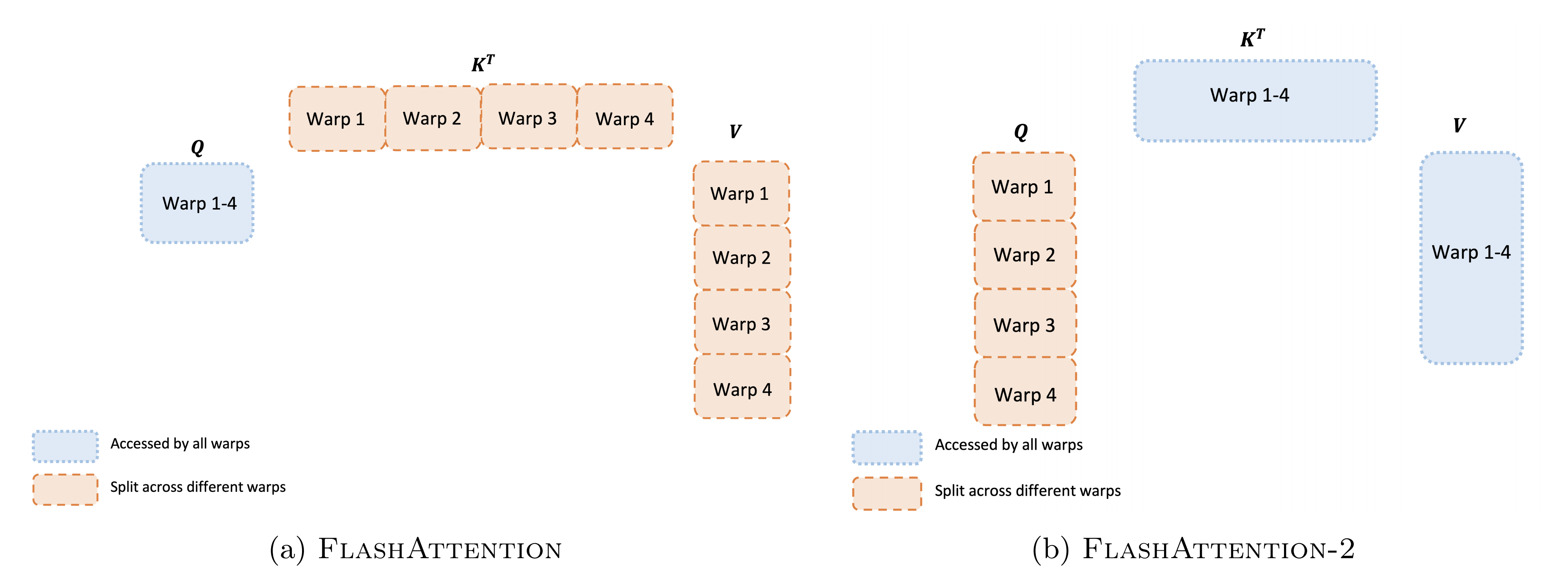
- 前向传播
对于每个块,Flash Attention将
在Flash Attention2中,将
- 反向传播
类似地,对于反向传播,选择对 warp
进行分区以避免“split-K”方案。但是,由于所有不同输入和梯度
- 调整块大小
增加块大小通常会减少共享内存的加载/存储,但会增加所需的寄存器数量和共享内存的总量。超过某个块大小后,寄存器溢出会导致速度明显减慢,或者所需的共享内存量大于
GPU 可用的内存量,内核根本无法运行。通常,选择大小为
四、Flash Decoding
在训练过程中,FlashAttention对batch size和query length进行了并行化加速。而在推理过程中,query length通常为1,这意味着如果batch size小于GPU上的SM数量(例如A100上有108个SMs),那么整个计算过程只使用了GPU的一小部分!特别是当上下文较长时,通常会减小batch size来适应GPU内存。例如batch size = 1时,FlashAttention对GPU利用率小于1%!
FlashAttention
在FlashAttentionz中
Flash-Decoding
上面提到FlashAttention对batch size和query length进行了并行化加速,Flash-Decoding在此基础上增加了一个新的并行化维度:keys/values的序列长度。即使batch size很小,但只要上下文足够长,它就可以充分利用GPU。与FlashAttention类似,Flash-Decoding几乎不用额外存储大量数据到全局内存中,从而减少了内存开销。
Flash Decoding主要包含以下三个步骤(可以结合上图来看):
- 将keys和values分成较小的block
- 使用FlashAttention并行计算query与每个block的注意力(这是和FlashAttention最大的区别)。对于每个block的每行(因为一行是一个特征维度),Flash Decoding会额外记录attention values的log-sum-exp(标量值,用于第3步进行rescale)
- 对所有output blocks进行reduction得到最终的output,需要用log-sum-exp值来重新调整每个块的贡献
实际应用中,第1步中的数据分块不涉及GPU操作(因为不需要在物理上分开),只需要对第2步和第3步执行单独的kernels。虽然最终的reduction操作会引入一些额外的计算,但在总体上,Flash-Decoding通过增加并行化的方式取得了更高的效率。
Using Flash-Decoding
- FlashAttention2.2及之后的版本
- xFormers0.0.22及之后的版本
xformers.ops.memory_efficient_attention模块 - FlashAttention提供了LLaMa v2/CodeLLaMa的例子(未实现)。此外,xformers提供了一个针对LLaMa v1/v2的小示例。
五、Flash Decoding++
5.1 简介
LLM推理中的主要操作如下图所示:linear projection(①和⑤)、attention(②、③和④)和feedforward network(⑥)。为简单起见,这里忽略了position embedding、non-linear activation、mask等操作。将LLM推理时对Prompt的处理过程称为预填充阶段(Prefill phase),第二阶段预测过程称为解码阶段(Decode phase)。这两个阶段的算子基本一致,主要是输入数据的shape是不同的。由于解码阶段一次只处理一个令牌(batch size=1,或batch size很小),因此输入矩阵是flat-shape matrices(甚至是vectors),参见下图解码阶段部分中和KV Cache拼接的红色向量。
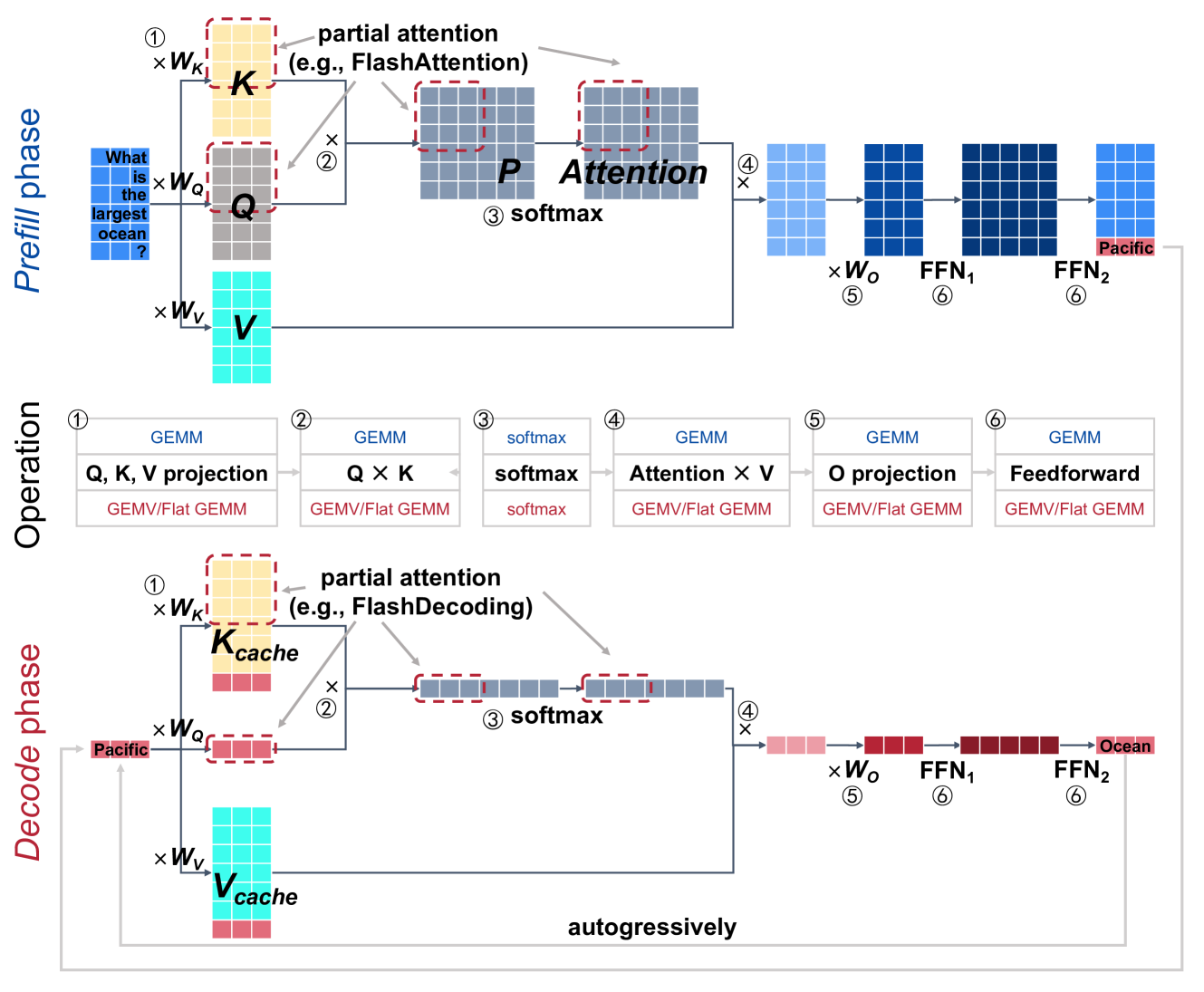
上图显示了 LLM
推理的主要数据流,其中预填充阶段和解码阶段都有一个Transformer层。Transformer可以分为flat
GEMM(通用矩阵乘法)操作(例如
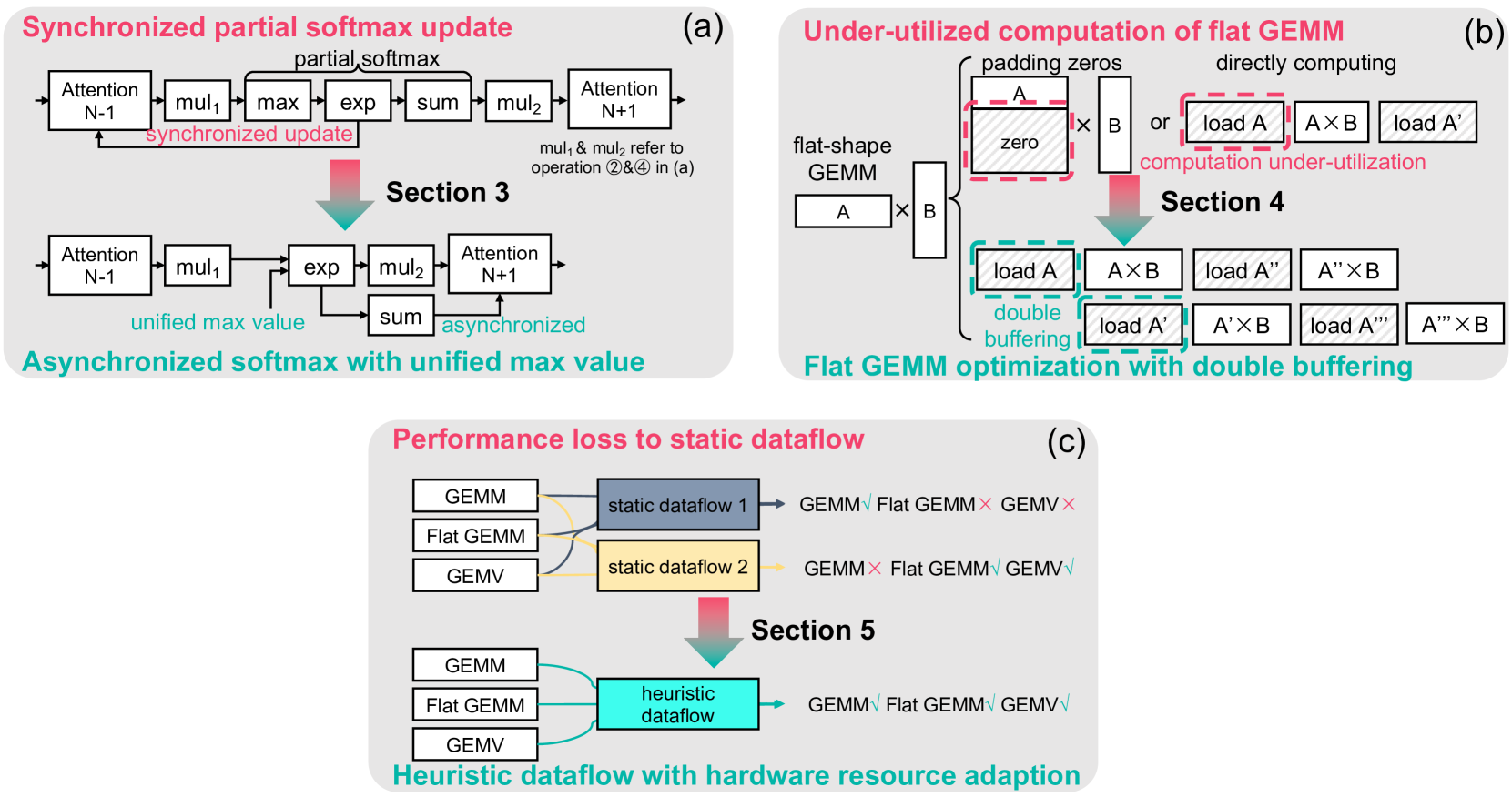
针对上述挑战,FlashDecoding++地提出:
- Asynchronized softmax with unified max value.FlashDecoding++ 利用统一的最大值来进行不同的partial softmax 计算。每个partial softmax 结果可以单独处理,无需同步更新。
- Flat GEMM optimization with double buffering.FlashDecoding++仅将矩阵大小填充为8,而不是之前针对Flat GEMM的设计中的64,以提高计算利用率。FlashDecoding++指出不同形状的Flat GEMM面临不同的瓶颈,并通过双缓冲等技术进一步提高内核性能。
- Heuristic dataflow with hardware resource adaption.FlashDecoding++ 同时考虑输入动态和硬件配置,并为 LLM 推理数据流动态应用内核优化。
下图展示了以上3种方法的示意图:
5.2 Asynchronized Softmax with Unified Maximum Value
不同 softmax 计算方案的比较。 (a) 整个向量的 Softmax 计算。 (b)计算每个部分向量的部分softmax,并且所有部分softmax结果需要同步更新操作。 (c)使用统一的最大值计算部分softmax,并且每个部分向量单独处理,没有同步更新。
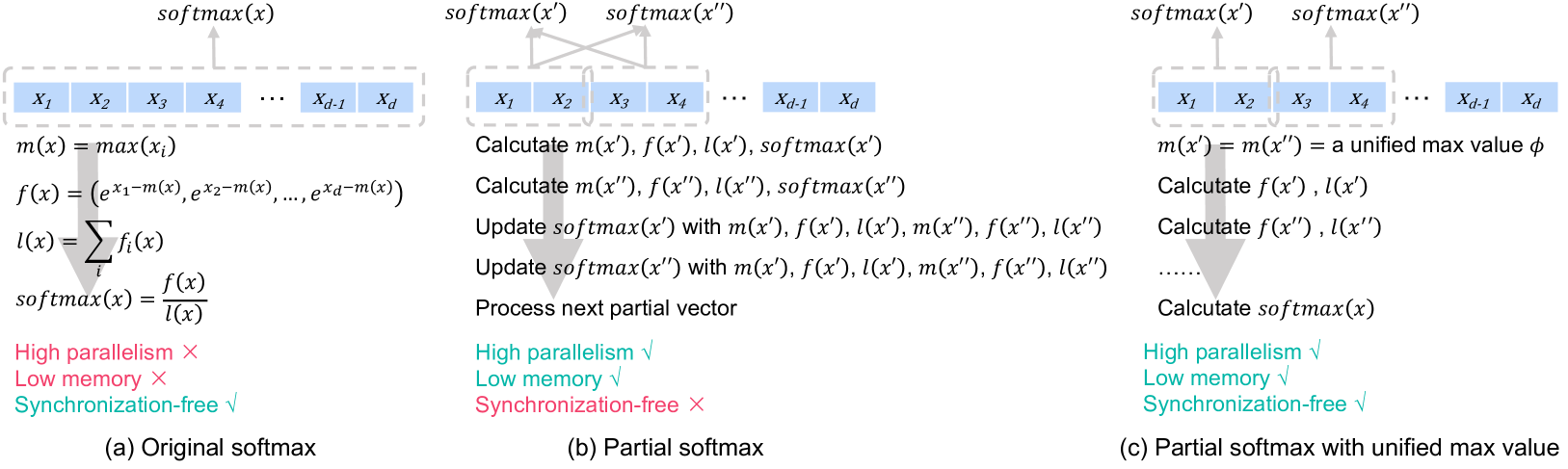
上图(a) 中所示的 softmax
操作需要先计算并存储所有全局数据,然后才能继续。这会导致内存消耗高且并行性低。FlashAttention提出了partial
softmax 技术来减少内存消耗,FlashDecoding提高并行性。(b) 展示了partial
softmax 操作的示意图。其主要思想是将向量
由于部分softmax需要根据其他部分softmax结果进行更新,因此不可避免地引入了数据同步操作。需要同步的原因在于每个部分向量的最大值不同。使用最大值来避免指数运算溢出(
为了去除同步操作,论文中提出找到一个合适的公共最大值
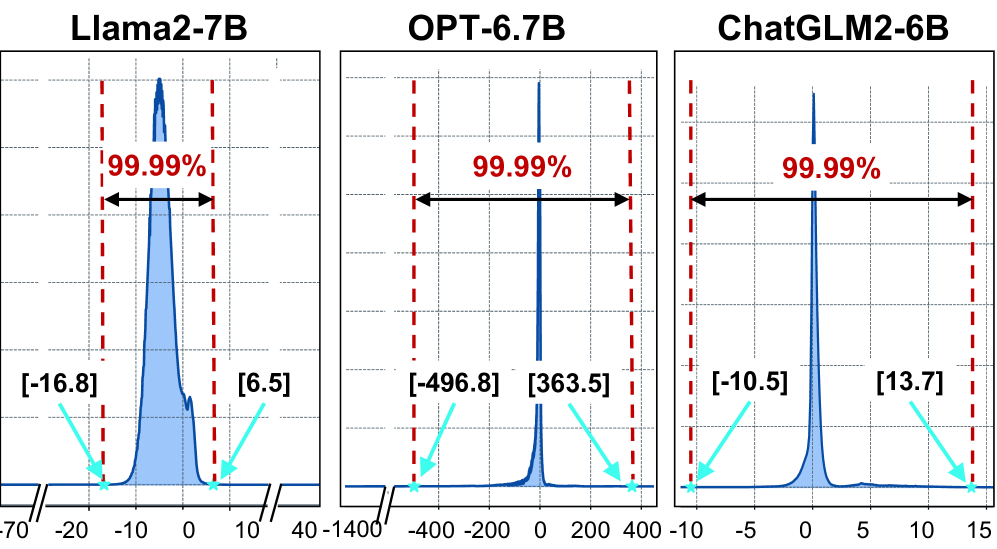
但是对于OPT-6.7B来说,其范围较大,可以采用动态调整策略,如果在推理过程中发现设置的
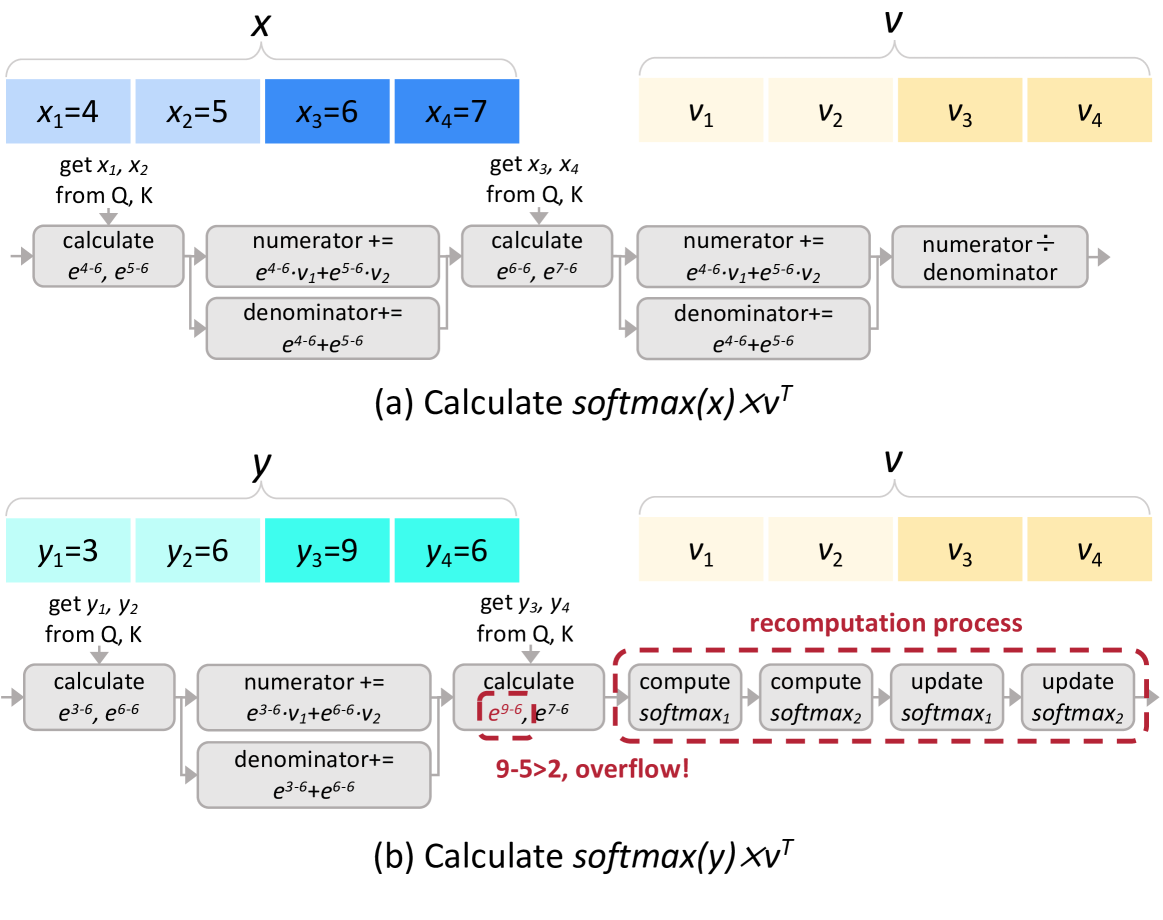
异步partial softmax 计算示例。 (a) 每个partial softmax 结果都是单独处理的,没有同步更新。 (b) 当发生溢出时,需要对所有 parital softmax 计算进行重新计算过程。
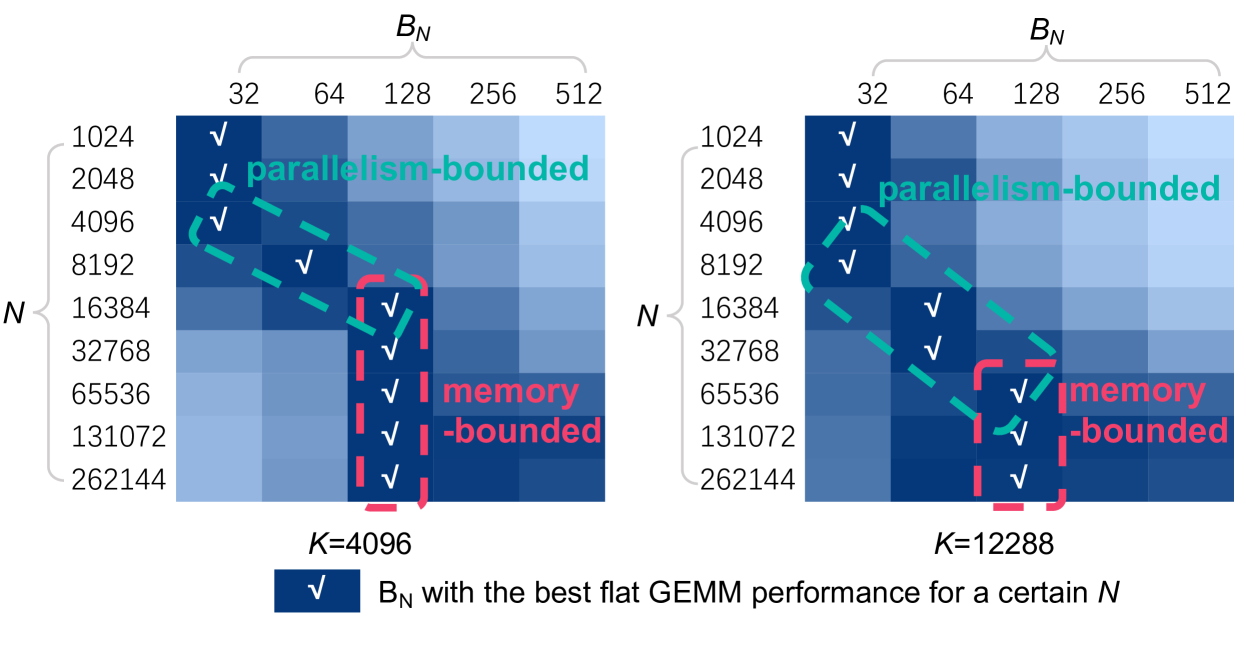
5.3 Flat GEMM Optimization with Double Buffering
decode阶段的过程主要由 GEMV(batch size=1)或平坦
GEMM(batch size > 1)操作组成。GEMV/GEMM 操作可以使用
假设
另一方面,并行度为
为了隐藏memory access latency,FlashDecoding++引入了double
buffering技术。具体来说就是在共享内存中分配两个buffer,一个buffer用于执行当前tile的GEMM计算,同时另一个buffer则加载下一个tile
GEMM所需的数据。这样计算和内存访问是重叠的,在
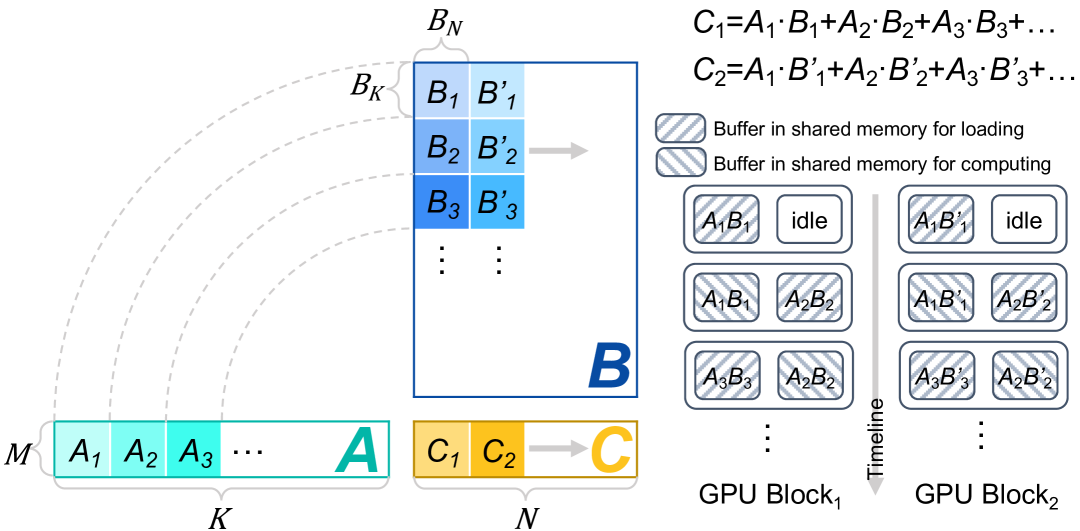
上图显示了使用double buffering的flat GEMM 优化示例。对于
5.4 Heuristic Dataflow with Hardware Resource Adaption
在LLM推理场景中,有多种因素影响线性工作负载的实现性能:(a)输入动态。批量大小和输入序列长度的变化带来了动态工作负载。 (b) 模型多样性。线性工作负载随模型结构和大小的不同而变化。 (c) GPU 容量。实现之间的相对性能随 GPU 特性而变化,例如内存带宽、缓存大小和计算能力。 (d) 工程影响。工程工作也极大地影响了内核性能。所有这些影响因素构建了一个巨大的搜索空间,使得在线性工作负载和相应的最佳实现之间生成有效的映射变得非常重要。
虽然这些因素构建了一个很大的搜索空间,但LLM中不同layer的同质性大大减少了算子优化的搜索空间。下图展示了
prefill 阶段和 decode 阶段的四个 GEMV/GEMM
操作,即
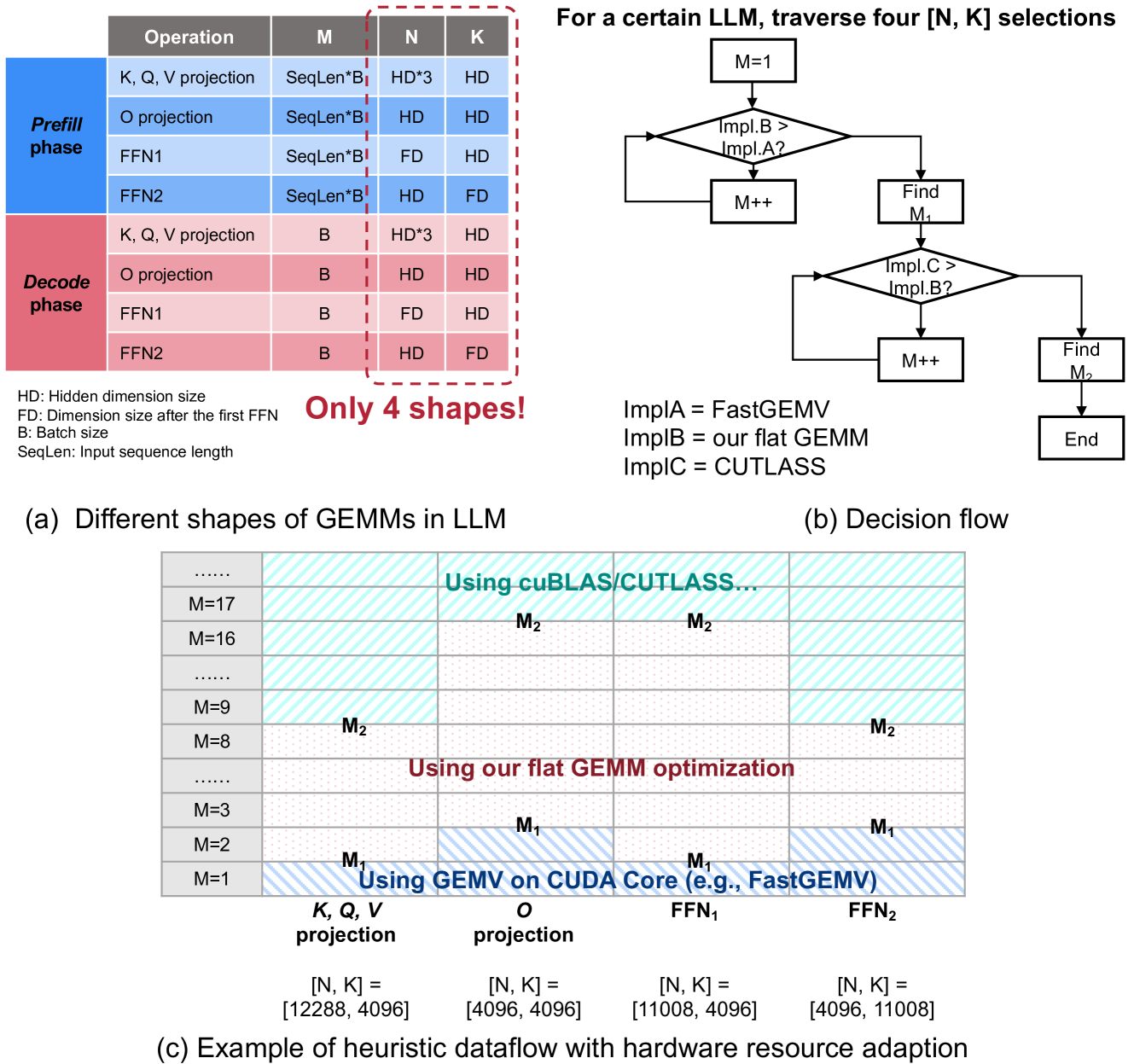
FlashDecoding++ 中具有硬件资源自适应的启发式数据流。
决策流程。因为对于某个 LLM 来说只有四种
启发式数据流。对于运行时 LLM 推理,当
上图(c) 展示了将启发式数据流应用于 Llama2-7B 模型的示例。四种
参考
- Efficient Memory Management for Large Language Model Serving with PagedAttention
- vLLM Paged Attention
- vLLM: Easy, Fast, and Cheap LLM Serving with PagedAttention
- LLM 高速推理框架 vLLM 源代码分析 / vLLM Source Code Analysis
- vLLM皇冠上的明珠:深入浅出理解PagedAttention CUDA实现
- PageAttention代码走读
- LLM(十七):从 FlashAttention 到 PagedAttention, 如何进一步优化 Attention 性能
- FlashAttention: Fast and Memory-Efficient Exact Attention with IO-Awareness
- 通透理解FlashAttention与FlashAttention2:全面降低显存读写、加快计算速度
- FlashAttention:加速计算,节省显存, IO感知的精确注意力
- SELF-ATTENTION DOES NOT
NEED
MEMORY - ELI5: FlashAttention ELI5:FlashAttention
- FlashAttention:具有 IO 感知,快速且内存高效的新型注意力算法
- FlashAttention图解(如何加速Attention)
- FlashAttention2详解(性能比FlashAttention提升200%)
- 图解大模型计算加速系列:Flash Attention V1,从硬件到计算逻辑
- 图解大模型计算加速系列:Flash Attention V2,从原理到并行计算
- 图解大模型计算加速系列:Flash Attention V1,从硬件到计算逻辑
- LLM(十七):从 FlashAttention 到 PagedAttention, 如何进一步优化 Attention 性能
- Flash Attention论文解读
- FlashAttention-2: Faster Attention with Better Parallelism and Work Partitioning
- Flash-Decoding for long-context inference
- FlashAttenion-V3: Flash Decoding详解
- FLASHDECODING++: FASTER LARGE LANGUAGE MODEL INFERENCE ON GPUS
- 【FlashAttention-V4,非官方】FlashDecoding++
- 大模型推理加速之FlashDecoding++:野生Flash抵达战场